مفاهیم فیزیکی که پایه مکانیکهای ارتودنسی را فرم می دهند، کلید فهم نحوه ی عملکرد دستگاه های ارتودنسی بوده و در طراحی دستگاهها و متدولوژی درمانهای ارتودنسی اهمیت حیاتی دارند. این مفاهیم فیزیکی تنها مختص به ارتودنسی نیستند بلکه قواعد ابتدایی علم مکانیک را شکل می دهند. ما در این فصل طرح کلی از قوانین و مفاهیم بنیادی که حرکت ارتودنتیک دندان را هدایت می کنند، ارائه می نماییم. تمام دستگاه هایی که تا به امروز گزارش شده اند و در آینده نیز به وجود خواهند آمد از این اصول مکانیک استفاده خواهند نمود. با این وجود بیایید از ابتدا، شروع کنیم: کلمه ی “مکانیک” به چه معناست؟
مکانیک را می توان شاخه ای از علم فیزیک دانست که با جنبه های مکانیکی هر نوع سیستمی سر و کار دارد. این شاخه به دو دسته تقسیم می شود: استاتیک ، که مطالعه عوامل مرتبط با سیستم های غیر متحرک (rigid) است، و دینامیک، که مطالعه عوامل مرتبط با سیستم های در حال حرکت (هم چون یک ماشین یا هواپیمای در حال حرکت) است.
روشهای مطالعه ی حرکت دندان
دو روش در مطالعه ی جنبه های بیولوژیک و مکانیکی حرکت دندان مورد استفاده قرار می گیرند: روش کمّی و روش کیفی. روش کمّی شامل توصیف حرکت دندانها یا ساختارهای اسکلتی همراه با آنها با مقیاس عددی است. همه ی ما با واژه هایی از جمله 3 میلیمتر کانین رترکشن یا 15 درجه flaring ثنایا آشنا هستیم. اما توصیف حرکت دندانی به تنهایی با استفاده از روش کمّی، ماهیت کامل حرکت را توضیح نمی دهد، و فهم نوع یا ماهیت حرکت دندانی که رخ داده نیز از اهمیت برخوردار است. یک روش کیفی حرکت را با واژه های غیر عددی توصیف می کند (به این معنی که هیچ بخشی از حرکت را اندازه نگرفته و یا نمی شمارد). این روش اغلب در سطح بالینی دنبال شده و هم چون tipping و translation از روی عکس های رادیوگرافی و یا مدل های گچی استنتاج می شود.
هر دو روش آنالیز کمّی و کیفی اطلاعات ارزشمندی راجع به کارایی حرکت فراهم می سازند. با این وجود، ارزشیابی کیفی روش غالب مورد استفاده ارتودنتیست ها در آنالیز حرکت دندانی است. اطلاعات به دست آمده با آنالیز کیفی می توانند با داده های کمّی تحقق بیابند و فرضیه های متعددی برای پروژه های تحقیقی با چنین روشی ایجاد می گردند.
مفاهیم مکانیکی پایه
سیستم و frame of reference
مفاهیم مرتبط با حرکت دندانها تا حد زیادی بر تعدادی از اصول پایه ی مکانیک فیزیکی تکیه دارد که با آنالیز عملکرد نیرو بر جسم سر و کار دارد. گام اول در ارزیابی هر نوع حرکت، شناسایی سیستم است. یک سیستم ، یک جسم یا گروهی از اجسام یا اشیاء هستند که حرکت آنها مورد ارزیابی قرار می گیرد؛ حال می تواند یک توپ، یک ماشین و یا یک دندان باشد. ما هم چنین نیازمند شناسایی یک frame of reference هستیم که حرکت سیستم در محدوده ی آن، رخ می دهد. این frame of reference میت واند یک محیط ثابت باشد یا چیزی باشد که خودش هم در حال حرکت است. استفاده از یک frame of reference ثابت، کمترین پیچیدگی را به همراه دارد. برای مثال حرکت دندانها را می توان در ارتباط با ساختارهای با ثبات استخوانی سر و صورت ارزیابی نمود که به طور شایعی در سوپرایمپوزیشن های سفالومتریک به کار می روند. از طرف دیگر می توان از frame of reference های درحال حرکت نیز استفاده نمود. مثال آن می تواند اینتروژن دندان های ثنایا باشد (تصویر 1-4). در این جا باید توجه زیادی در انتخاب frame reference جهت اندازه گیری اینتروژن مبذول داشت. شما باید بدانید که می خواهید حرکت دندانها را در مقایسه با یکدیگر، یا در مقایسه با ساختار دیگری در مجموعه فک و صورت، یا حتی در مقایسه با یک reference frame خارجی در بیرون از این مجموعه، اندازه بگیرید.
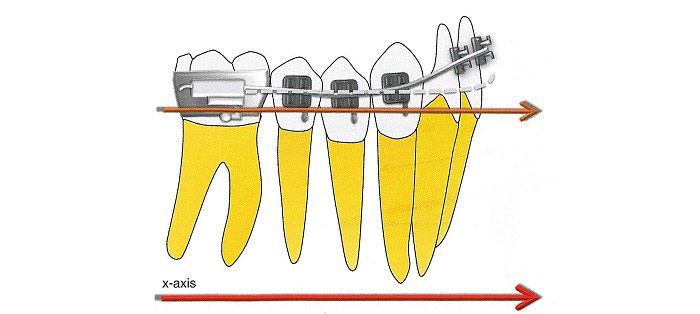
روش 1: frame of reference انتخابی، دندان های خلفی هستند و با خط نارنجی نمایش داده می شوند. دندان های خلفی حین اینتروژن دندان های ثنایا، ثابت باقی نمانده و تا حدی حرکت می کنند (یعنی، خود frame of reference هم جابه جا می شود). به این ترتیب، هر اندازه گیری که بر روی دندان ثنایا صورت می گیرد، به جای اعلام میزان “مطلق” حرکت دندان های ثنایا، اطلاعاتی را در رابطه با حرکت آنها نسبت به دندان های خلفی، فراهم می کند. روش 2: انتخاب یک frame of reference در خارج از سیستم که با خط قرمز نشان داده شده است. این frame of reference داخل سیستم نبوده و به این ترتیب تحت تاثیر هیچ حرکت دندانی نیز نیست.
برقراری یک frame of reference
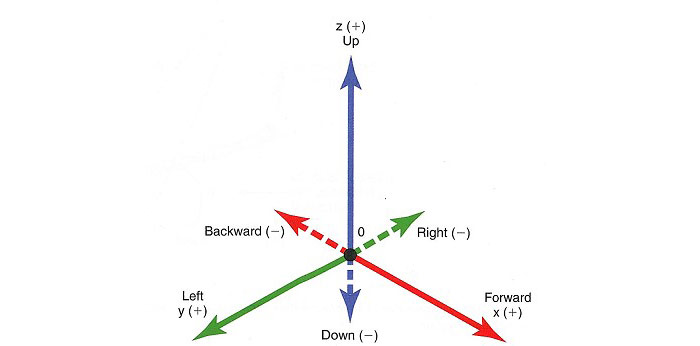
ساده ترین و قابل درک ترین راه تعیین جهت حرکت دندان، ایجاد پلان ها و یا محورهای اندازه گیری بر حسب رابطه دندانها نسبت به زمین است. به این ترتیب، محورها و پلان های اندازه گیری در فضا تعریف می شوند. هر پلان یا محور موازی با زمین، پلان یا محور افقی است. هر پلان یا محور عمود بر زمین، پلان یا محور عموی است. دو محوری که بر یکدیگر عمودند اما با زمین موازی هستند، محور های X و Y نام دارند. جهت forward به صورت مثبت (+) و جهت backward به صورت منفی (-) در نظر گرفته می شود. جهت محور y، در چپ و راست جسم مورد اندازه گیری قرار دارد. جهت چپ، مثبت و جهت راست، منفی در نظر گرفته می شود. محور سوم که عمود بر دو محور قبلی است عمودی بوده و محور z نام دارد. جهت upward مثبت و جهت downward منفی است. این سه محور (x، y، و z) برای توصیف محل یک دندان و یا سیستم مورد ارزیابی در فضا و تعیین جهت حرکت به کار می روند. این محورهای فضایی با تغییر جهت گیری جسم در فضا تغییر نمی کنند بلکه در ارتباط با زمین و مشاهده کننده به طور ثابت قرار دارند (تصویر 2-4).
دانلود بیومکانیک در ارتودنسی قسمت1 انتشارات آرتین طب