سیم مستقیم قرار داده شده در براکت های زاویه دار
این روش به ارتودنتسیت اجازه می دهد سیم مستقیم را در براکت های نامرتب به کار ببرد. این کار باعث تحریک فعال شدن سیستم نیرو می شود. می توان سیستم نیرو را با افزودن خم های مناسبی که نیروی آنها با سیستم نیروی سیم مستقیم جمع می شود، تقویت نمود. این تکنیک روش “superposition” نام دارد و اغلب درمراحل ابتدایی و level و align کردن درمان ارتودنسی و گاهاً در حین مراحل finishing و زمانیکه محل براکت ها برای تصحیح ریشه تغییر داده می شود، به کار می رود.
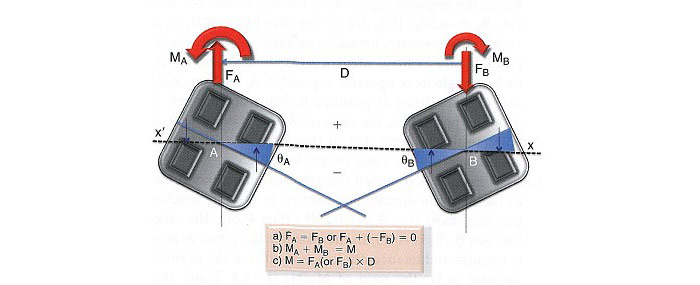
گام اول در فهم این روش، توصیف دقیق سیستم است. تصویر 19-4 نحوه ی عملکرد این سیستم را نشان می دهد. محور بین براکتی (D) مرکز دو attachment را به هم متصل می کند. به این محور، فاصله بین براکتی یا محور x-xˊ نیز می گویند. هر دو براکت با این محور افقی زاویه ای می سازند. هر دو قسمت سیم-attachment، در صورت مشخص بودن D و زوایای θA و θB به طور کامل تعریف می شوند. برحسب زاویه و میزان فاصله بین براکتی، راههای بیشماری برای قرار دادن براکت ها نسبت به یکدگیر وجود دارد. هر هندسه یا نحوه ی آرایش براکت ها را می توان با نسبت زاویه براکت ها به محور x-xˊ تعریف نمود. هر هندسه دارای سری اختصاصی سیستم های نیروی خود بوده و توسط یک “class” معرفی می شود. بیایید هر کلاس را به صورت جداگانه بررسی کنیم.
در حالیکه ما کلاسهای مختلف را معرفی می کنیم، خواننده یک تغییر تدریجی در θA را مشاهده خواهد کرد، در حالیکه زاویه θB ثابت نگه داشته می شود. از آن جا که، به طور قراردادی θA همواره مساوی یا کوچکتر از θB است، می توان صرف نظر از دندانهای درگیر، 6 کلاس را برای توصیف هر قسمت دو-دندانی به کار برد. یک روش ثابت علامت گذاری قرار دادی، نیز برای توصیف زاویه براکت ها به کار می رود. زاویه براکت، هم علامت با گشتاور لازم برای قرار دادن سیم در براکت است. اگر محور براکت (خط آبی) در هر نقطه ای به زیر محور x-xˊ برود، علامت قراردادی برای زاویه تشکیل شده (θA یا θB ) منفی (-) خواهد شد. تمام نیروهای رو به پایین و گشتاورهای خلاف عقربه ساعت نیز منفی هستند.
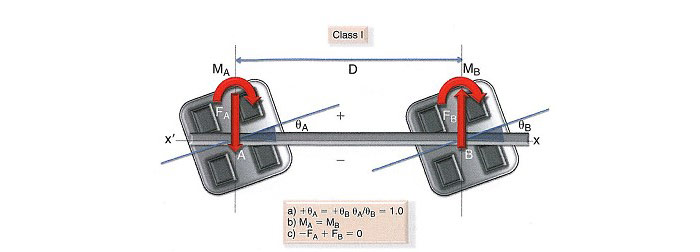
کلاس I: در این جا دو براکت ارتودنسی نسبت به محور بین براکتی هم جهت بوده و دارای زاویه مساوی هستند (یعنی θA = θB ، و / θB = 1.0 θA )(تصویر 20-4). دو گشتاور برابر هستند؛ و نسبت MA/MB = 1 است. با وجود آنکه ممکن است اندازه ی گشتاورها بسته به میزان فعال سازی و فاصله بین براکتی تغییر کند، نسبت MA به MB همواره در کلاس I، 1+ می ماند. علاوه بر گشتاور، دو نیروی عمودی نیز تولید می شوند: یک نیروی منفی در محل A و یک نیروی مثبت در محل B. بر طبق قوانین تعادل نیروی A برابربا نیروی B است.
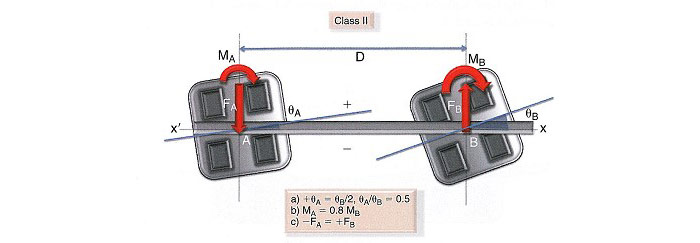
کلاس II: هندسه ی کلاس II با / θB = 0.5 θA مشخص می شود (تصویر 21-4). دو گشتاور مثبت در محلهای A و B در سیم ایجاد می شوند. بزرگی گشتاور A ، 0.8 برابر گشتاور در B ست. یک نیروی مثبت در A و یک نیروی منفی در B وجود دارد.
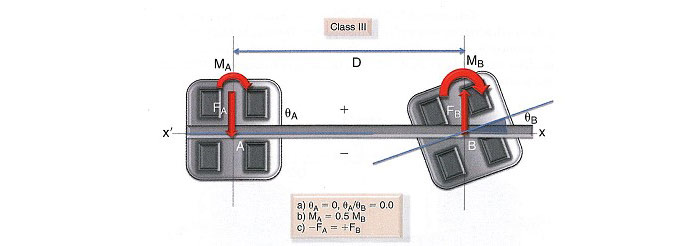
کلاس III: در هندسه کلاس III محور بین براکتی از براکتها می گذرد؛ به بیان دیگر، زاویه براکت A نسبت به محور x-xˊیا سیم، صفر درجه است (تصویر 22-4). بنابرین، / θB = 0 θA بوده و درنتیجه سیم قرار گرفته در براکت دندان کانین (A) از مرکز slot براکت قرار گرفته روی دندان پرمولر (B) می گذرد. بزرگی گشتاور در A، 0.5 برابر گشتاور در B است. یک نیروی مثبت در A و یک نیروی منفی در B وجود دارد.
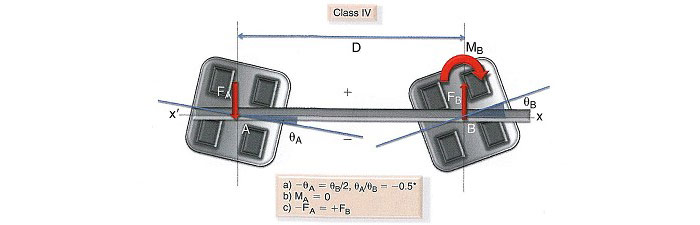
کلاس IV: در اینجا براکت A ، نصف زاویه ی براکت B را در جهت مخالف نسبت به محور x-xˊدارد (یعنی / θB = – 0.5 θA) (تصویر 23-4). نسبت بین / θB θA ، 0.5- است. یک گشتاور مثبت در B وجود دارد، اما هیچ گشتاوری در A وجود ندارد. بلکه تنها یک نیروی منفرد در A داریم که با نیروی B برابر و در جهت مخالف آن است. از آنجا که هیچ گشتاوری در محل A وجود ندارد MA/MB = 0 است. جالب توجه است که این هندسه تقریباً مشابه یک سیستم نیروی یک-کوپل عمل می کند.
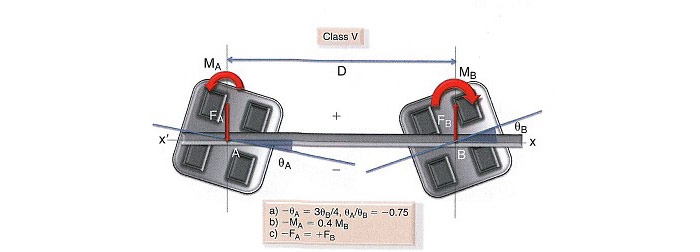
کلاس V: براکت A، دارای سه چهارم زاویه براکت B در جهت مخالف نسبت به محور بین براکتی ست. (یعنی / θB = – 0.75 θA) (تصویر 24-4). نسبت بین / θB θA ، 0.75- است. در این مثال گشتاور A منفی بوده و میزان آن دو پنجم گشتاور مثبت در نقطه ی B است. MA/MB = – 0.4. نیروهای عمودی مساوی و خلاف جهت با یکدیگر در نقاط A و B عمل می کنند.
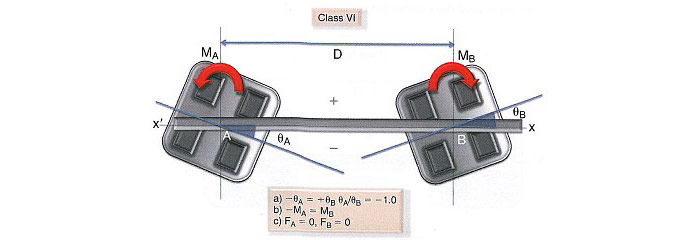
کلاس VI: در این کلاس، براکت A همان زاویه ی براکت B را در جهت مخالف دارد؛ به نحویکه، نسبت زوایا 1- است (یعنی / θB = – 1 θA) (تصویر 25-4). سیستم نیروی موثر بر سیم متشکل از گشتاورهای برابر و مخالف هم است (در A منفی و در B مثبت) (یعنی MA/MB = – 1). هیچ نیروی عمودی حضور ندارد.
این شش کلاس بالینی در حقیقت معرف یک توالی از سیستم های نیروی امکان پذیر هستند، که می توانند یک سیم بین دو براکت را در تعادل قرار دهند. نکته ی مهم، دانستن سیستم نیروی نسبی است، نه اندازه ی دقیق نیرو. برای مثال، می بینید که چگونه با رفتن از کلاس I به کلاس II وجلوتر، نیروهای عمودی کاهش می یابند، تا کلاس VI که دیگر هیچ نیروی عموی وجود ندارد. به بیان دیگر، می توانیم بگوییم که با کاهش نسبت θA/θB ، اندازه ی نیرو نیز کاهش می یابد. این مطلب به آسانی از معادله ی زیر در تصویر 19-4 دریافته می شود:
FA یا FB = MA + MB / D ، اینجاFB – FA =
گشتاورهای موجود در هر کلاس، و اینکه چگونه زاویه براکت قادر به تغییر آنها است، نیز از اهمیت بالایی برخوردار هستند. با تغییر نسبت θA/θB از یک کلاس به کلاس بعد، در یک وضعیت دینامیک (مثلا در سطح بالینی) ، سیستم نیرو روی سیم و درنتیجه بر روی دندانها به طور قابل ملاحظه ای تغییر می کند.
دانلود بیومکانیک در ارتودنسی قسمت8 انتشارات آرتین طب