انواع حرکت دندانی (تصویر 15-4)
همانطور که در بخش پیش گفته شد، مرکز چرخش، کلید تعیین ماهیت حرکت دندان است. کنترل کردن CROT ، به طور خودکار کنترل دقیقی را بر نوع (و گستره ی) حرکت دندان، فراهم می کند. زمانی که یک نیروی منفرد بر دندان وارد شود، دندان در جهت نیروی اعمال شده حرکت می کند. بعلاوه، دندان، بسته به فاصله ی نیرو از CRES ، یک گشتاور (MF) را حول CRES تجربه می کند. ترکیب نیرو و گشتاور باعث چرخش دندان در حین حرکتش می شود و CROT را اندکی اپیکال تر از CRES قرار می دهد. 1و5و7 این نوع حرکت دندانی، tipping ساده یا tipping کنترل نشده، نام دارد. می توان به آسانی تجسم کرد که اینجا تاج و ریشه در خلاف جهت یکدیگر، حرکت می کنند. حرکت Tipping میتواند بر حسب محل CROT در طول دندان، به صورت های مختلفی انجام شود. با این وجود، این حرکت، برای تسهیل طبقه بندی، به دو گروه تقسیم می شوند:
- Tipping کنترل شده: CROT حین چنین حرکتی، در اپکس ریشه قرار دارد. دندان مشابه آونگ روی ساعت حرکت می کند، به نحوی که اپکس در یک نقطه خاص ثابت شده و تاج از یک سمت به طرف دیگر حرکت می کند.
- حرکت ریشه: اینجا CROT در نوک تاج قرار دارد و ریشه آزاد است تا در جهت نیرو حرکت کند. این حرکت در منابع ارتودنسی به طور متداولی به عنوان حرکت tipping طبقه بندی نمی شود، بلکه این حرکت تنها از نظر مکانیک، مشابه tipping کنترل شده است.
تقریباً تمام دنیای حرکت دندانی متشکل از tipping تاج دندان، (ندرتاً) ریشه، و یا (شایعترین) ترکیب هر دو است. با این وجود، یک حرکت بسیار نادرنیز وجود دارد که به سختی قابل دست یابی است: translation که گاهی اوقات آنرا حرکت bodily هم می نامند. در این جا هم تاج و هم ریشه به یک اندازه و در یک جهت، بدون هیچ چرخشی حرکت می کنند. در این مورد CROT وجود ندارد، یا به بیان ریاضی به بینهایت می رود.
تصویر 15-4 انواع حرکات دندانی. A، tipping کنترل نشده. B، tipping کنترل شده. C، حرکت ریشه (تورک). D، حرکت translation یا bodily. مرکز چرخش در تمام موارد، با یک نقطه ی قرمز نشان داده شده است. دقت کنید که مرکز چرخش حین حرکت translation (D) در بی نهایت قرار دارد، یا به بیان دیگر، اصلاً مرکز چرخشی وجود ندارد.
نسبت گشتاور به نیرو (M/F)
شایعترین حرکت دندانی در درمان ارتودنسی معمول، tipping کنترل نشده است؛ اما این حرکت، همیشه حرکت دلخواهی نیست. برای تغییر این الگوی حرکت دندانی و ایجاد یک الگوی جدید، باید سیستم نیروی وارد به دندان را تغییر داد. دو روش اصلی برای دست یابی به این امر، برحسب مکانیک دخیل، وجود دارد:
- تغییر نقطه ی اعمال نیرو (تصویر 16-4): یک راه ساده ی آن، اعمال نیرو در نقطه ای نزدیکتر به CRES دندان است. می توان یک rigid attachment که اغلب power arm نام دارد را به براکت روی دندان متصل نمود. سپس، نیرو را به این Power arm اعمال نمود. به این ترتیب خط نیرو به یک محل جدید منتقل شده و فاصله اش از CRES تغییر می کند. به این صورت گشتاور نیرو هم تغییر می کند. برای مثال اگر power arm ، بلند و rigid فرم داده شود و از CRES دندان بگذرد، می توان بازوی گشتاور (MF) را به کل حذف نمود زیرا نیرو اکنون از مرکز مقاومت دندان می گذرد. این روش به زیبایی در هنگام تغییر دادن حرکت tipping تاج عمل می کند؛ با این وجود، این روش در حرکتهایی که به سطوح بالاتری از کنترل نیاز دارند (مثل translation و حرکت ریشه)، به مشکل برمی خورد. بازوهای طویل می توانند با گسترش به درون وستیبول و تجاوز به لثه یا گونه، باعث آزار بیمار شوند. در ضمن، بازوها گاهی اوقات به اندازه کافی rigid نبوده و تحت تاثیر نیرو دچار درجاتی از خمش می گردند. (یک مورد بالینی از حرکت translation با استفاده از power arm در فصل 6 توضیح داده شده است.)
تصویر 16-4 کاربرد یک power arm به منظور ایجاد انواع مختلفی از حرکات دندانی. توجه نمایید که نیرو از A تا D، ثابت نگه داشته شده است. A، حرکت tipping کنترل نشده، بدون power arm. B، حرکت tipping کنترل شده که توسط یک power arm در زیر مرکز مقاومت دندان ایجاد شده است. C، حرکت translation، چرا که با افزایش طول power arm، عبور نیرو از مرکز مقاومت دندان امکان پذیر شده است. D، حرکت ریشه به همراه حداقل حرکت تاج؛ در اینجا، power arm به ورای مرکز مقاومت گسترش یافته است. (نقطه ی قرمز، مرکز چرخش بوده و نقطه ی آبی، مرکز مقاومت دندان را نشان می دهد.) توجه کنید که چگونه با افزایش یا کاهش فاصله ی نقطه ی اعمال نیرو از مرکز مقاومت، میزان MF نیز افزایش یا کاهش می یابد.
- تغییر نسبت گشتاور به نیرو (تصویر17-4): یک روش جایگزین برای تغییر حرکت دندان، دستکاری بخش چرخشی نیروی اعمال شده است (یعنی MF). این روش با افزودن یک گشتاور counterbalancing (یعنی گشتاوری در جهت مخالف MF) به سیستم صورت می گیرد. می توان این گشتاور جدید را به دو روش ایجاد کرد. روش اول، راه متعارف اعمال یک نیرو است (این نیرو متفاوت با نیروی سازنده MF است). با این حال، با وجود تنها یک براکت متصل به دندان، اعمال نیرو به نقطه ی دیگر، کار دشواری است. بنابرین این روش معمولاً عملی و کارا نیست. روش دوم شامل ایجاد یک کوپل در براکت است. یک آرچ وایرrectangular که در rectangular slot یک براکت قرار داده می شود، شایعترین روش مورد استفاده است. این گشتاور جدید (Mc) به همراه نیروی اعمال شده، ماهیت حرکت دندانی را تعیین می کند. این ترکیب به طور شایعی به عنوان نسبت گشتاور به نیرو (Mc/F ratio) شناخته می شود. با تغییر این نسبت می توان کیفیت حرکت دندانی را به tipping، translation و حرکت ریشه تغییر داد (به این معنی که با تغییر اندازه ی کوپل و نیروی اعمال شده، مراکز چرخش متفاوتی در طول محور طولی دندان ایجاد می شوند). در ارتباط با جهت نیز، گشتاور کوپل (Mc) تقریباً همیشه در جهت مخالف گشتاور نیرو (MF) حول CRES است.
دقت کنید که در ارتودنسی، گشتاورها با گرم-میلیمتر و نیروها با گرم اندازه گیری می شوند؛ بنابرین، واحد نسبت بین این دو، میلیمتر است. این نسبت هم چنین بیانگر فاصله ای از براکت است، که در آن، یک نیروی منفرد قادر به ایجاد همین اثر (یعنی از طریق power arm) باشد.
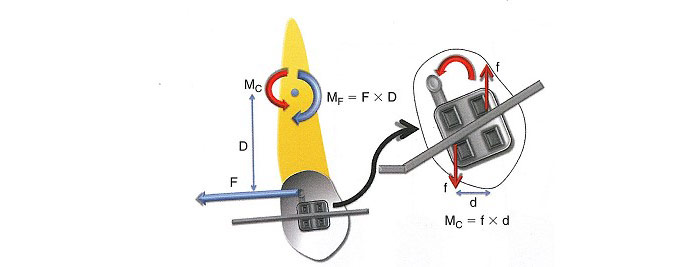
تصویر 17-4 یک نمای شماتیک، تولید گشتاور ناشی از کوپل (MC) را نمایش می دهد. نسبت MC به نیروی اعمال شده (F)، ماهیت حرکت دندان را تعیین می نماید (M/F ratio). هر چه این نسبت بالاتر باشد، کنترل بیشتری بر روی حرکت دندان، حاصل می شود.
تصویر 18-4 یک نمای شماتیک، سیستم نیروی یک-کوپل را نشان می دهد. گشتاور (M) تولید شده توسط سیستم، حاصل نیروی اعمال شده و فاصله ی (D) بین دو نیرو است، و منجر به چرخش کل سیستم می گردد. این سیستم، مانند هر سیستم rigid دیگری، باید در تعادل قرار داشته باشد. به بیان دیگر، باید جمع تمام نیروها و گشتاورهای اعمال شده به آن، برابر با صفر باشد. به این ترتیب باید دو نیروی FA و FP با یکدیگر برابر باشند. علاوه بر این، گشتاور ناشی از کوپل (MC) درون تیوب نیز باید برابر با گشتاور سیستم (M) باشد. MC توسط تماس سیم با لبه های تیوب ایجاد می شود که خود تولید کننده ی نیروهای (f) نشان داده شده با رنگ آبی است.
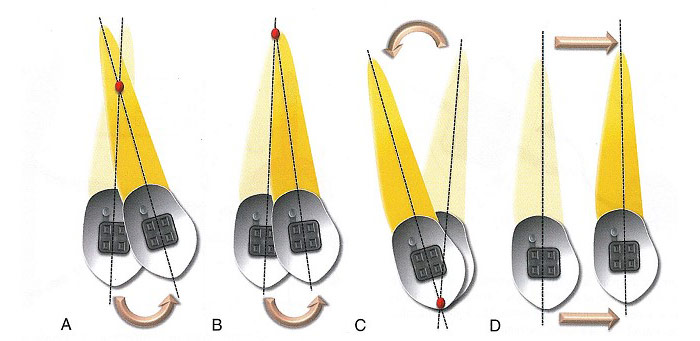
دقت کنید که مرکز چرخش حین حرکت translation (D) در بی نهایت قرار دارد، یا به بیان دیگر، اصلاً مرکز چرخشی وجود ندارد.
نسبت گشتاور به نیرو (M/F)
شایعترین حرکت دندانی در ارتودنسی معمول، tipping کنترل نشده است؛ اما این حرکت، همیشه حرکت دلخواهی نیست. برای تغییر این الگوی حرکت دندانی و ایجاد یک الگوی جدید، باید سیستم نیروی وارد به دندان را تغییر داد. دو روش اصلی برای دست یابی به این امر، برحسب مکانیک دخیل، وجود دارد:
- تغییر نقطه ی اعمال نیرو (تصویر 16-4): یک راه ساده ی آن، اعمال نیرو در نقطه ای نزدیکتر به CRES دندان است. می توان یک rigid attachment که اغلب power arm نام دارد را به براکت روی دندان متصل نمود. سپس، نیرو را به این Power arm اعمال نمود. به این ترتیب خط نیرو به یک محل جدید منتقل شده و فاصله اش از CRES تغییر می کند. به این صورت گشتاور نیرو هم تغییر می کند. برای مثال اگر power arm ، بلند و rigid فرم داده شود و از CRES دندان بگذرد، می توان بازوی گشتاور (MF) را به کل حذف نمود زیرا نیرو اکنون از مرکز مقاومت دندان می گذرد. این روش به زیبایی در هنگام تغییر دادن حرکت tipping تاج عمل می کند؛ با این وجود، این روش در حرکتهایی که به سطوح بالاتری از کنترل نیاز دارند (مثل translation و حرکت ریشه)، به مشکل برمی خورد. بازوهای طویل می توانند با گسترش به درون وستیبول و تجاوز به لثه یا گونه، باعث آزار بیمار شوند. در ضمن، بازوها گاهی اوقات به اندازه کافی rigid نبوده و تحت تاثیر نیرو دچار درجاتی از خمش می گردند. (یک مورد بالینی از حرکت translation با استفاده از power arm در فصل 6 توضیح داده شده است.)
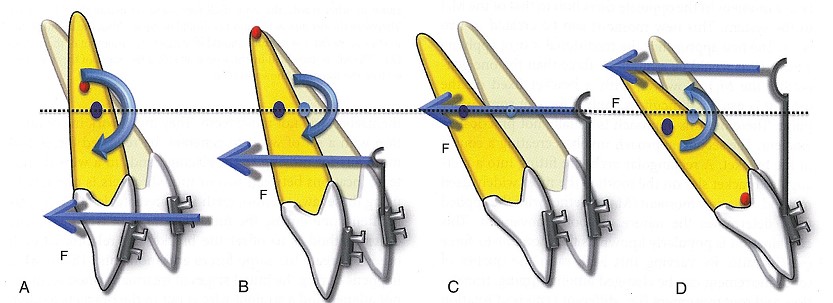
. A، حرکت tipping کنترل نشده، بدون power arm. B، حرکت tipping کنترل شده که توسط یک power arm در زیر مرکز مقاومت دندان ایجاد شده است. C، حرکت translation، چرا که با افزایش طول power arm، عبور نیرو از مرکز مقاومت دندان امکان پذیر شده است. D، حرکت ریشه به همراه حداقل حرکت تاج؛ در اینجا، power arm به ورای مرکز مقاومت گسترش یافته است. (نقطه ی قرمز، مرکز چرخش بوده و نقطه ی آبی، مرکز مقاومت دندان را نشان می دهد.) توجه کنید که چگونه با افزایش یا کاهش فاصله ی نقطه ی اعمال نیرو از مرکز مقاومت، میزان MF نیز افزایش یا کاهش می یابد.
تغییر نسبت گشتاور به نیرو (تصویر17-4): یک روش جایگزین برای تغییر حرکت دندان، دستکاری بخش چرخشی نیروی اعمال شده است (یعنی MF). این روش با افزودن یک گشتاور counterbalancing (یعنی گشتاوری در جهت مخالف MF) به سیستم صورت می گیرد. می توان این گشتاور جدید را به دو روش ایجاد کرد. روش اول، راه متعارف اعمال یک نیرو است (این نیرو متفاوت با نیروی سازنده MF است). با این حال، با وجود تنها یک براکت متصل به دندان، اعمال نیرو به نقطه ی دیگر، کار دشواری است. بنابرین این روش معمولاً عملی و کارا نیست. روش دوم شامل ایجاد یک کوپل در براکت است. یک آرچ وایرrectangular که در rectangular slot یک براکت قرار داده می شود، شایعترین روش مورد استفاده است. این گشتاور جدید (Mc) به همراه نیروی اعمال شده، ماهیت حرکت دندانی را تعیین می کند. این ترکیب به طور شایعی به عنوان نسبت گشتاور به نیرو (Mc/F ratio) شناخته می شود. با تغییر این نسبت می توان کیفیت حرکت دندانی را به tipping، translation و حرکت ریشه تغییر داد (به این معنی که با تغییر اندازه ی کوپل و نیروی اعمال شده، مراکز چرخش متفاوتی در طول محور طولی دندان ایجاد می شوند). در ارتباط با جهت نیز، گشتاور کوپل (Mc) تقریباً همیشه در جهت مخالف گشتاور نیرو (MF) حول CRES است.
دقت کنید که در ارتودنسی، گشتاورها با گرم-میلیمتر و نیروها با گرم اندازه گیری می شوند؛ بنابرین، واحد نسبت بین این دو، میلیمتر است. این نسبت هم چنین بیانگر فاصله ای از براکت است، که در آن، یک نیروی منفرد قادر به ایجاد همین اثر (یعنی از طریق power arm) باشد.
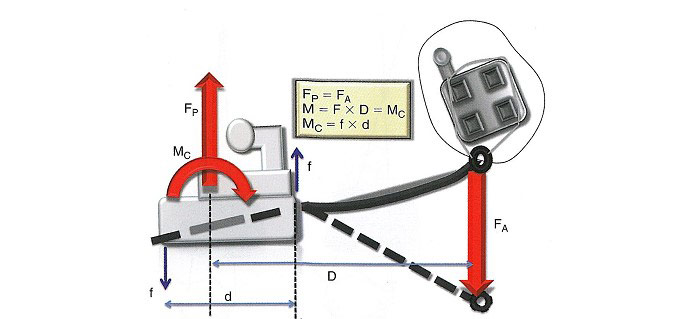
. این سیستم، مانند هر سیستم rigid دیگری، باید در تعادل قرار داشته باشد. به بیان دیگر، باید جمع تمام نیروها و گشتاورهای اعمال شده به آن، برابر با صفر باشد. به این ترتیب باید دو نیروی FA و FP با یکدیگر برابر باشند. علاوه بر این، گشتاور ناشی از کوپل (MC) درون تیوب نیز باید برابر با گشتاور سیستم (M) باشد. MC توسط تماس سیم با لبه های تیوب ایجاد می شود که خود تولید کننده ی نیروهای (f) نشان داده شده با رنگ آبی است.
دانلود بیومکانیک در ارتودنسی قسمت6 انتشارات آرتین طب