سیم های زاویه دار (خم شده) در براکت های مرتب
خم کردن سیمها در انتهای درمان ارتودنسی، یک اقدام درمانی شایع است. این کار، به افزودن آخرین جزئیات به یک مال اکلوژن به خوبی درمان شده، کمک می کند. هم چون روش superposition، وسعت بالایی از محل ها و انواع خم ها را میتوان تعبیه کرد. با این وجود، برای فهم دینامیک چنین خم هایی، می توان آنها را بر اساس نوع سیستم نیرویی که ایجاد میکنند، به طبقات زیر تقسیم نمود.
I: Step bends
II: Off-centered “V” bends
III: Centered “V” bends
در این روش مهم است که ابتدا سیم را به طور غیرفعال بین دو براکت قرار داد و سپس “V” bend و یا step bend مناسب را افزود. به بیان دیگر، این روش ابتدا سیستم های نیرویی که توسط یک سیم مستقیم در براکت های نامرتب ایجاد می شود را حذف نموده و سپس سیستم نیروی مطلوب را با افزودن خم به سیم ایجاد می کند. بنابرین از آن تحت عنوان روش subtraction هم یاد می کنند.
هر کدام از این خم ها از نظر نیروها و گشتاورهایی که در دو انتها ایجاد می کند، با بقیه متفاوت است. به یاد داشته باشید که این روش نتایج مشابهی با روش superposition که در بالا آورده شد، حاصل می کند؛ و هم چنین به هندسه های متعددی تقسیم می شود. انواع هندسه های این روش به گروه های زیر تقسیم می شود:
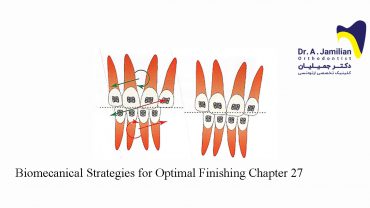
- Step bends. این خم ها، هندسه ی کلاس I و II توضیح داده شده در بخش قبل را بازسازی می کنند. آنها نیازمند دو خم، در هر جایی درون فاصله بین براکتی سیم هستند.
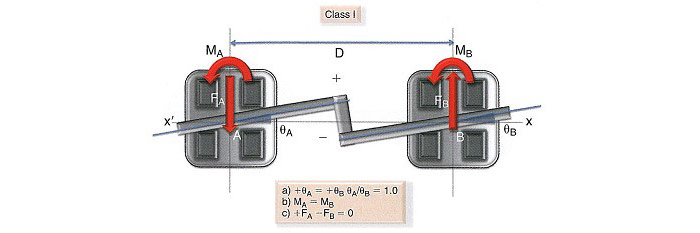
کلاس I: یک step در سیم بین دو براکت، نیروهای عموی هم اندازه و خلاف جهت هم به همراه کوپل های هم جهت با گشتاورهای هم اندازه تولید می کند (تصویر26-4). از آنجا که گشتاورها هم جهت و هم اندازه هستند، MA/MB = 1. این نسبت، سیستم نیروی نسبی ناشی از یک step در سیم را معرفی می کند، که مشابه نسبت کلاس I در سیم مستقیم همراه با براکت های موازی stepped است (نصویر 20-4). به یاد داشته باشید که جهت ایجاد هندسه کلاس I با ایجاد خم، قسمت های سیمی که وارد slot براکت ها می شوند باید با یکدیگر موازی باشند ( با خطوط آبی در تصویر 26-4 نشان داده شده اند)؛ به بیان دیگر زاویه ی خم ها باید مشابه و هم جهت باشند (یعنی θA = θB ، و / θB = 1.0 θA ).
حرکت دادن step در بعد مزیودیستال، سیستم نیروی مطلق یا نسبی را تغییر نمی دهد. هم چنین نسبت MA/MB = 1 نیز، مستقل از فاصله بین براکتی است و با step کوچکتر یا بزرگتر هم تغییر نمی کند.
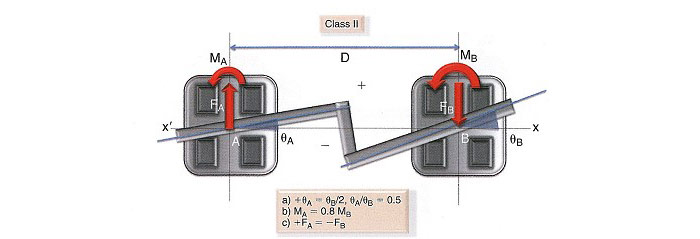
کلاس II: این هندسه با ایجاد زوایای خمی نابرابر ایجاد می گردد، و اگر به طور ذهنی انتهای قطعات سیمی که به درون slot براکت ارتودنسی می روند را ادامه دهیم خارج از بازه بین براکتی یکدیگر را قطع می نمایند (تصویر 27-4).
- Off-centered “V” bends. همانگونه که از اسمش پیدا است، یک “V” bend ، شامل قرار دادن تنها یک خم روی سیم در طول فاصله بین براکتی است. یک V bend، برخلاف یک step bend، بسته به محل مزیودیستال خم، به طور قابل ملاحظه ای سیستم نیرو را تغییر می دهد. بنابرین می توان این خم ها را بر اساس محل خم، به هندسه های زیر تقسیم نمود (کلاس III تا VI).
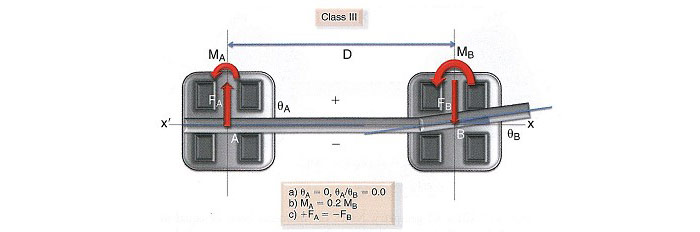
کلاس III: V bend بسیار نزدیک به یکی از براکت ها قرار داده می شود (تصویر 28-4). براکت نزدیک خم، گشتاور بزرگتری خواهد داشت؛ در حالیکه براکت دورتر، گشتاور بسیار کوچکتری دارد که با گشتاور دیگر هم جهت است.
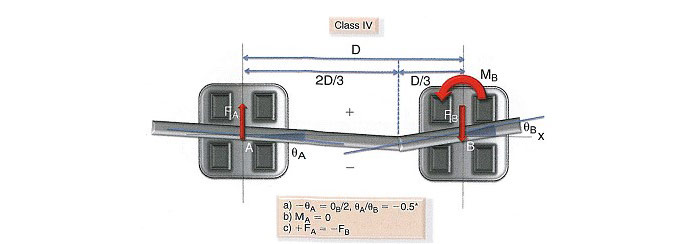
کلاس IV: V bend در یک سوم فاصله بین براکتی قرار می گیرد. هیچ گشتاوری در براکت دورتر از خم وجود ندارد (تصویر 29-4).
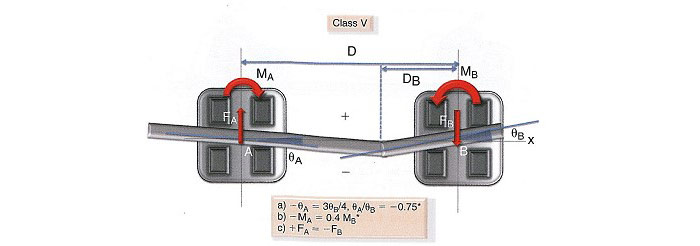
کلاس V: خم به مرکز فاصله بین براکتی نزدیکتر شده است (تصویر 30-4). از این نقطه به بعد یک گشتاور بر روی براکت دورتر ایجاد می شود که دارای جهتی مخالف با گشتاور دیگر است.
- Centered V bends.
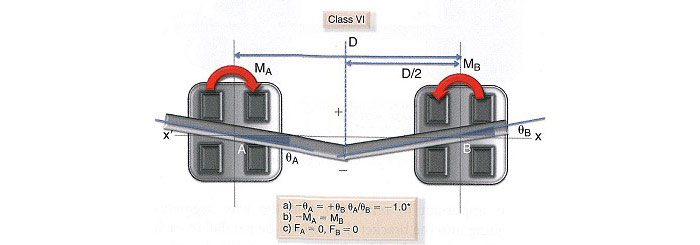
کلاس VI: وقتی یک V bend در مرکز قرار می گیرد، گشتاورهای برابر و مخالف هم تولید شده و در نتیجه هیچ نیروی عمودی ایجاد نمی شود (تصویر 31-4).
آنالیز سیستم های نیرو منجر به کاربردهای بالینی مهمی در استفاده از خم ها و قراردهی و زاویه دادن به براکت ها در درمان ارتودنسی روزمره شده است. باید مجدداً تاکید کنیم که درک سیستم نیروی نسبی (نه نیروی مطلق) ضروری است. در تمام هندسه های خم هایی که گفته شد، ارتفاع خم و فاصله بین براکتی، سیستم نیروی نسبی را تغییر نمی دهند؛ اما مشخصاً باعث تغییر نیروها و گشتاورهای مطلق خواهند شد. این آنالیز، هم چنین اساس آنالیز کردن سیستم های نیروی پیچیده تر و بغرنجتری که ممکن است در شرایط بالینی حقیقی تولید شود را شکل می دهد.
خلاصه
در این فصل تاکیدی قوی بر روی مفاهیم پایه ی اصول مکانیک دخیل در حرکت دندان قرار دادیم. جلوتر در این کتاب کاربرد بالینی این اصول را خواهیم دید. باور ما بر آن است که با باز کردن مکانیک های پایه حرکت دندانی و ادغام آنها با پیشرفت های جدید، قادر به کاراتر کردن حرکت دندانی به همراه حداقل اثرات سوء هستیم. کلنیسین هایی که اوصول حرکت دندانی را درک می کنند کنترل بهتری روی مکانیک های درمانشان و کارایی بیشتری در حرکت دندان دارند.
دانلود بیومکانیک در ارتودنسی قسمت9 انتشارات آرتین طب