دانلود در انتهای فصل
مقدمه
در درمانهای ارتودنسی بر اثر اعمال نیروها دنانها حرکت می کنند نیروها توسط دستگاه های ارتودنسی اعمال شده و توسط متخصص ارتودنسی روی دندانها و ساختمان های مجاور واکنش های بیولوژیکی ایجاد می شود که منجر به حرکت دندان در استخوان می گردد. فعالیت سلول های فضای پریودنتال بستگی به طرح براکت شکل وایر و یا نوع آلیاژ ندارد، فعالیت این سلولها فقط بر اساس فشار و کشش است که در محیط اطراف انها اتفاق می افتد. برای ایجاد پاسخ بیولوژیکی نیرو باید همراه با محرک مشخصی مثل محرک مکانیکی یا غیره به کار برده شود. به علت پیچیدگی و تنوع در سیستم بیولوژیکی لازم است در بکار بردن هر محرکی دقت به عمل آید در درمانهای ارتونسی با به حداقل رسانن یا با از بین بردن فاکتورهای ناشناخته می توان پاسخ های متفاوت بیولوژیکی را کاهش داد اطلاع کافی از علم مکانیک برای کنترل حرکات ارتودنسی ضروری است.
اساس درمانهای ارتودنسی متکی به اصول بیمکانیک است. علم مکانیک دانشی است که اثر نیرو بر جسم را مورد مطلعه قرار می دهد. بیومکانیک اثرات علم مکانیک روی سیستم بیولوژیکی را مورد بررسی قرار می دهد. در درمانهای ارتودنسی نیروها اعمال می شود این نیروها توسط انواع مختلف دستگاه ایجد می گردند. شباهت اثر دستگاههای ارتودنسی مانن استفاده دارو در علم پزشکی است. داروها برای ایجاد پاسخ بیولوژیکی استفاده می شوند و باعث برطرف کردن ناراحتی و یا درد بیمار می گردد. تجویز درست دارو نیازمند به دانستن مکانیسم اثر دارو در درمانهای ارتودنسی داشتن در رابطه با سیستم نیروها ضروری است. بطور طبیعی درمانهای ارتونسی نزدیک به دو سال ادامه می یابد. این زمان برای تصحیح عوارضی که ر خلال درمان ایجاد می شوند به کار می رود. اگر اصول بیومکانیک در درمان بکار برده شود نه تنها زمان درمان کاهش می یابد بلکه طرح درمان با نتایج قابل پیش بینی برای هر بیمار انجام می گردد. کاربرد صحیح اصول بیومکانیک باعث افزایش کارایی دستگاه ارتودنسی و بیهوده نتایج دندان می گردد.
اصول مکانیکی در ارتودنسی
برای ایجاد رابطه بین بیومکانیک و ارتودنسی آشنایی با اصول مکانیک ضروری است.
در ابتدا شناخت مرکز مقاومت لازم است تمام اجسام دارای مرکز ثقل هستند. مرکز ثقل نقطه ای است که اگر از ان بگذرد جسم در فضا به صورت تنه ای یا انتقالی بدون هیج گونه چرخش جابجا می شوند. به عبارت دیگر می توان گفت مرکز ثقل جسم در حالت استقرار به عنوان نقطه تعادل جسم می باشد. شکل 1-4 مرکز ثقل یک جسم ازاد را نشان می دهد. دندانی که توسط بافت پریودنتال نگهداری می گردد و توسط این بافت احاطه شده است بعنوان یک جسم ازاد تلقی نمی گردد. برای اجسامی که ازاد نیستن همان نقطه تعادل است. شکل 1-4 محل تقریبی مرکز نقاومت را برای دو دندان در فک بالا و هم چنین این فک را نشان می دهد.
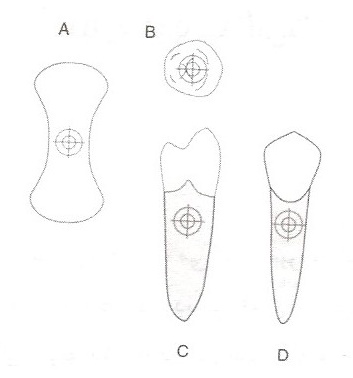
شکل 1-4 در این تصویر مرکز مقاومت مشاهده می شود A مرکز ثقل یک جسم ازاد را نشان می دهد B C D نشان دهنده مرکز مقاومت یک دندان است. B نمای اکلوزال، C نمای پروکزیمال، D نمای باکال
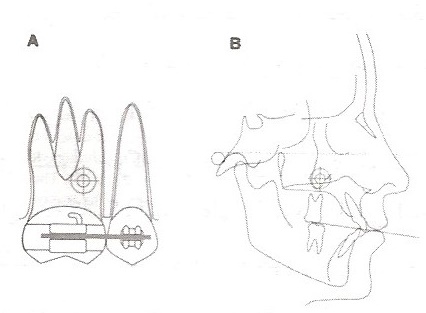
شکل 2-4 A مرکز مقاومت دو دندان ، B مرکز مقاومت فک بالا
مرکز مقاومت در هر دندان بستگی به طول ریشه ها مرفولوژی ریشه ها، تعداد ریشه ها و میزان استخوان آلوئول دارد. موقعیت دقیق مرکز مقاومت در هر دندانی به راحتی مشخص نمی گردد. مطالعات و بررسی وضعیت ریشه، نشان می دهد که مرکز مقاومت یک دندان تک ریشه ای با شرایط استخوان الوئول نرمال در حدود 4/1 تا 3/1 فاصله ز محل وجود همه دندان ها و یا قسمتی از دندانها می تواند تخمین زده شود. مطالعات و ازمایشات نشان می دهد که مرکز مقاومت فک بالا مختصری در سمت پایین نقطه orbitale و در قسمت دیستال ریشه دندانهای لاترال در حرکات دندانهای قدامی فک بالا قرار دارد.
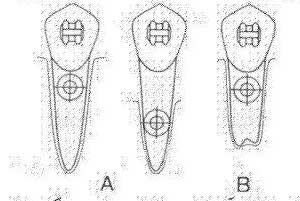
شکل 3-4 محل مرکز مقاومت به ارتفاع استخوان الوئول و طول ریشه بستگی دارد. A در این تصویر مرکز مقاومت دندان همراه با تحلیل استخوان مشاهده می شود B در این تصویر مرکز مقاومت در دندانی با ریشه کوتاه مشاهده می شود.
اگرچه تعیین دقیق محل مرکز مقاومت غیر ممکن است ولی شنایی با این محل برای یک دندان یا مجموعه ای از دندان ها در هنگام انتخاب یا فعال کردن دستگاه ارتودنسی مهم است. رابطه بین نیروی اعمال شده نسبت به مرکز مقاومت نوع حرکت دندانی را مشخص می کند. این رابطه با جرئیات بیشتری توضیح داده خواهد شد.
اصول نیرو باعث حرکت دندان می گرد. نیرو برابر با حاصلضرب جرم در شتاب است. واحدهای ان برابر نیوتون یا گرم میلی متر بر مجذور ثانیه است. چون از نظر کلینیکی مقدار شتاب نسبت. به اندازه نیرو ناچیز است. در کلینیک گرم به جای نیوتون بکار می رود. نیرو بصورت بردار است و با خصوصیات بردارها معرفی می گردد.
کمیت های بردار با داشتن مقدار نیرو و جهت نیرو مشخص می گردند و مقدار بردار توسط اندازه بردار تعیین می گردد. جهت بردار با جهت اثر با اثرات نیرو با مبدا نیرو بت محل اثر نیرو مشخص می گردند. نیروهای ارتودنسی توسط روش های متفاوتی اعمال می گردند. این روش ها شامل کش ها خم در وایر فنرها و غیره می باشند.
چندین بردار نیرو در یک مسیر از طریق جمع ریاضی به یک بردار از لحاظ ریاضی غیرممکن است. حاصل جمع دو یا چند بردار دیگر در حالی که خط اثر انها حفظ شده باشد با یکدیگر جمع می شوند. محصله این نیروها با رسم یک بردار بدست می اید مقدار محصله نیرو از طریق محاسبه مثلثاتی به دست می اید.
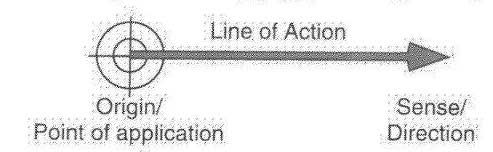
شکل 4-4 بردار نیرو ها با مقدار جهت اثر مبدا و اثرات نیرو مشخص می گردد
بردارها می توانند به مولفه هایی تجزیه گردند. تقسیم نیروها به مولفه ها در محور های xyz می تواند ماهیت بردارها را تعیین کند. از نظر کلینیکی تشخیص مولفه های افقی و عمودی و عرضی نیرو باعث پیش بینی بهتر نسیر حرکت دندان می گردد. محاسبه مثلثاتی برای به ست اوردن مقادیر مولفه های بردارها باید به کار برده شود.
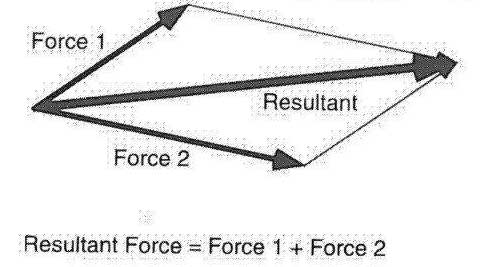
شکل 5-4 جمع دو یا چند بردار به نام محصله نامیده می شوند.
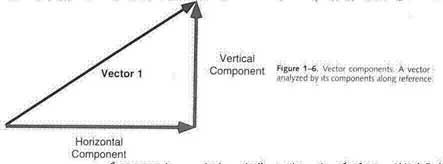
شکل 6-4 نشان می دهد که یک بردار می تواند به مولفه هایی در امتداد محورهای xy تجزیه شود.
نیروهای ارتونسی اکثرا به تاج دندان وارد می شود بنابراین نیرو از مرکز مقاومت دندان نمی گذرد. نیروهایی که از مرکز مقاومت نمی گذرند حرکت انتقالی ایجاد نمی کنند و گشتاور نیرو در اطراف مرکز مقاومت به سوی مبدا نیرو حاصل می شود. واحد اندازه گیری گشتاور بر حسب گرم میلی متر یا نیوتون میلی متر است. به علت این که امکان تعیین دقیق مرکز مقاومت دندان تا بحال مقدور نبوده است لذا از نظر کلینیکی در اغلب موارد گشتاور شناخته شده نیست شناخت گشتاور برای کارایی بهتر دستگاه های ارتودنسی لازم است.
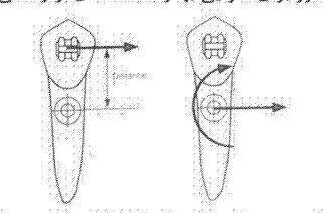
شکل 7-4 نیرویی که از مرکز مقاومت عبور نمی کند باعث ایجاد حرکت چرخشی انتقالی می شود.
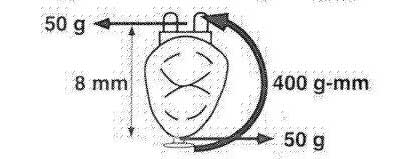
مقدار گشتاور توسط دو عامل تعیین می گردد. یکی میزان نیرو. دیگری فاصله است. متخصص ارتودنسی می تواند هرکدام از این عوامل را برای ایجاد نیروی مورد نظر تغییر دهد.
روش دیگر در ایجاد حرکت های چرخشی استفاده از گشتار مزدوج است. یک زوج نیرو به صورت دو نیروی موازی و با اندازه مساوی هستند که در مسیر مقابل هم و جدا از همدیگر اعمال می شوند. اندازه یک زوج نیرو برابر با حاصلضرب اندازه نیرو در فاصله ببین انها می باشند. واحد اندازه گیری انها گرم بر میلی متر است. مسیر چرخش با تبعیت از از مسیر هر کدام از نیروها در اطراف مرکز مقاومت نسبت به نیروی دیگر مشخص می شود. اعامل زوج نیرو در اطراف مرکز مقاومت بدون توجه به محل اثر ولی با فصله مساوی از مرکز مقاومت باعث حرکت خالص چرخشی می شود. در ارتودنسی زوج نیرو برای ایجاد گشتاور به کار می روند. Torque مشابه گشتاور است Torque اشتباها به صورت زاویه توسط خیلی از ارتودنتیستها بیان می شود. تغییر میزان پیجش در وایر با مقدار زاویه براکت روش هایی برای ایجاد گشتاور می باشد. یعنی شکل وایر با مقدار زاویه براکت می تواند گشتاور تولید کند واحد مناسب برای Torque برابر با گرم میلی متر است. شرح فوق الذکر توصیف گشتاور که به صورت مناسب تری مولفه های چرخشی سیستم نیرو را بیان می کند.
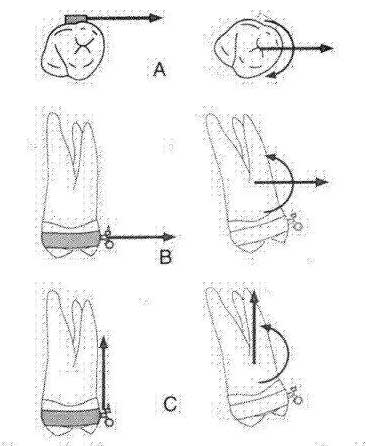
شکل 8-4 اثر گشتاور های نیرو در این شکل ها مشاهده می شود A نیروی مزیالی باعث حرکت mesial in می شود B نیروی expansion باعث باکالی کردن دندان می شود C نیروی instrusive باعث باکالی کردن دندان می شود.
شکل 9-4 یک زوج نیرو باعث حرکت چرخشی خالص در اطراف مرکز مقومت می شود.
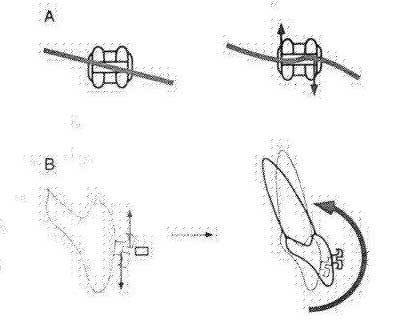
در شکل 10 -4 مثال های کلینیکی از یک زوج نیرو مشاهده می شود A قرار گرفتن یک وایر در براکت زاویه دار B قرار گرفتن یک وایر چهارگوش در براکت استاندارد سیستم edgewise
سیستم در حال تعادل
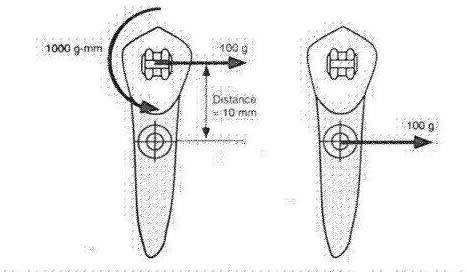
نیرو یا زج نیروها در براکت اعمال می شوند وایر ها کش ها از طریق نیرو به دندان نیرو وارد می کنند . یک روش مناسب برای پیش بینی نوع حرکت دندان توسط دستگاه اردتونسی, بررسی سییتم نیروی معادل در مرکز مقاومت دندان است . در بررسی این سیستم, نیروی به کار برده شده از طرف وایر ها-کشها و یا فنرها از طریق براکت با نیروی معادل آن در مرکز مقاومت برابر می باشد. سیستم نیرو در مرکز مقاومت نوع حرکت دندان را مشخص می کند . یک نیروی خالص در مرکز مقاومت منجر به حرکت انتقالی می گردد. در حالی که یک زوج نیرو باعث چرخش می شود.
بررسی سیتم نیرو در مرکز مقاومت یک روش ساده است. در حالت اول اگر نیرو ها در مرکز مقاومت اثر نمایند بردار این نیرو باعث حرکت مرکز مقاومت با حفظ نیرو و جهت نیرو می گردد. نیرو در براکت باعث ایجاد گشتاور می شود. این گشتاور برابر با حاصلضرب اندازه نیرو در فاصله از محل اثر نیرو تا مرکز مقاومت است. در حالگشتاور نهایی را ایجاد کنند و باعث حرکت در دوم مسیر گشتاور نیرو از مرکز مقاومت می گذرد. در حالت سوم گشتاور از مرکز مقاومت می گذارد بطوریکه گشتاور ناشی از نیرو و گشتاور کاربردی روی همدیگر اضافه شده تا گشتاور نهایی را ایجاد کنند و باعث حرکت در جهت مورد انتظار شوند. بررسی سیتم نیروی در حال تعادل و پیش گویی حرکت دندان نیاز به شناخت گشتاورها و نیروهای به کار برده شده دارد.
شکل 11- 4 در این تصویر سیستم نیروها در حالت تعادل در مرکز مقاومت دندانها مشاهده می شود A نیرو در براکت اعمال شده است B نیرو در مرکز مقاومت اعمال شده است که در این حالت حرکت مورد انتظار ایجاد می شود.
انواع حرکت دندانی
حرکت دندانی به چند نوع تقسیم می شوند با وجود تنوع بسیار زیاد در حرکات دندانی انها به چهار گروه اصلی تقسیم می گردند که شامل موارد زیر است :
حرکت چرخشی انتقالی
حرکت انتقالی
حرکت ریشه
حرکت چرخشی
هرکدام از این حرکات بعلت تفاوت در گشتاورها و نیروها بوجود می ایند رابطه بین نیرو و نوع حرکت دندانی بر اساس نسبت نیرو/ گشتاور شرح داده می شود. به عبارت دیگر نسبت نیرو/گشتاور نوع حرکت دندانی یا مرکز چرخش را مشخص نمایید.
حرکت چرخشی انتقالی
حرکت چرخشی انتقالی حرکتی است که در ان تاج بیشتر از ریشه حرکت می کند در این حرکت مرکز چرخش نسبت به مرکز مقاومت بطرف ریشه قرار می گیرد حرکت چرخشی انتقالی بر اساس موقعیت مرکز چرخش به صورت غیر کنترل شده و کنترل شده تقسیم می گردد . مرکز چرخش در حرکت کنترل نشده تاج بین مرکز مقاومت و انتهای ریشه واقع است و مرکز چرخش در حرکت کنترل شده تاج در انتهای ریشه قرار دارد.
حرکت چرخشی انتقالی کنترل نشده
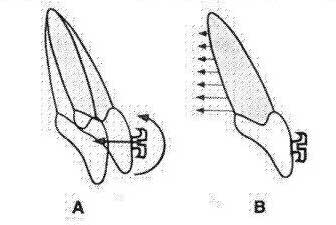
این حرکت در اثر اعمال نیروی افقی در ناحیه براکت ایجاد می شود. در این حالت حرکت انتهای ریشه و تاج در دو جهت مخالف می باشد . این حرکت از ساده ترین حرکت های دندانی می باشد اما در اغلب موارد حرکت نامطلوبی قلمداد می شود. شکل A 12- 4 دندان قدامی فک بالا با محور طولی مناسب را نشان می دهد که احتیاج به عقب بردن دارد. اگر یک نیروی ساده مثل کلاس I مکانیک مانند coil spring همراه با وایر قطر کم به کار برده می شود انتهای ریشه در جهت قدامی حرکت خواهد کرد.
شکل B 12-4 وجود نواحی فشار را در حرکت کنترل نشده نشان می دهد. فشارها به صورت یکنواخت و یک شکل نیستند و حداقل فشار در انتهای ریشه و در ناحیه کرست استخوان الوئول دیده می شود.
نسبت نیرو/گشتاور در این حرکت برابر 0/1 تا حداکثر 5/1 است.
استفاده از این حرکت در بیماران C III Div II ،C I III که دندانهای قدامی فک بالای انها به میزان زیادی عمدی قرار دارد، همراه با نیروهای جلو اورنده باعث بیرون زدگی دندانهای قدامی می گردد.
12 -4 A حرکت چرخشی انتقلی کنترل نشده توسط یک نیروی منفرد ایجاد می شود، B به نواحی فشار در PDL و به حرکت انتهای ریشه در خلاف جهت تاج توجه شود.
حرکت چرخشی انتقالی کنترل شده
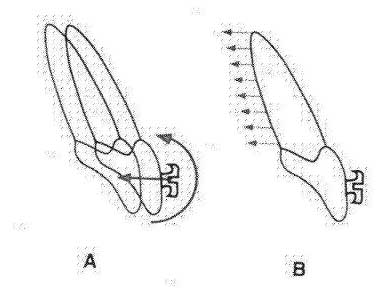
حرکت چرخشی انتقالی کنترل شده یک نوع حرکت مطلوب دندانی است این حرکت با کاربرد نیرو برای حرکت تاج مانند غیر کنترل شده و با کاربرد گشتاور به منظور کنترل یا حفظ موقعیت انتهای ریشه انجام می گردد. شکل A 13-4 نشان می دهد که در حرکت کنترل شده مرکز چرخش دندان در انتهای ریشه است. نسین نیرو/گشتاور برابر با 7/1 برای این حرکت لازم است.
شکل B13-4 این نوع حرکت، به همراه فشار روی بافت های پریودنتال را نشان می دهد. نواحی فشار در انتهای ریشه به حداقل میرشد و باعث دست نخوردگی ناحیه انتهای ریشه می شود. وجود فشار در ناحیه کرست استخوان آلوئول باعث ایجاد این حرکت می گردددر بیمارانی با دندانهای قدامی بیرون زده در فک بالا که انتهای ریشه موقعیت مناسبی دارد و احتیاج به حرکت ندارند، از این نوع حرکت استفاده می شود.
شکل 13-4A در این تصویر حرکت کنترل شده با مرکز چرخش در انتهای ریشه مشاهده می شود. B بیشترین مقدار فشار در ناحیه کرست استخوان آلوئول است.
حرکت انتقالی
حرکت انتقالی، حرکتی است که به عنوان تنه ای نیز نامیده می شود. وقتی انتهای ریشه و تاج با فاصله یکسان و در یک مسیر افقی حرکت می کنند حرکت انتقالی روی می دهد. مرکز چرخش این نوع حرکت در بی نهایت است.
شکلA14-4 حرکت انتقالی در یک دندان قدامی فک بالا را نشان می دهد. معمولا نیرو در محل براکت اثر می کند و از مرکز مقاومت فاصله دارد ولی نیروی افقی در مرکز مقاومت دندان ایجاد می گردد باعث این نوع حرکت می شود. اگر یک نیرو به تنهایی در براکت اثر کند منجر به حرکت انتقالی نمی شود. برای انجام حرکت انتقالی از طریق براکت استفاده از یک زوج نیرو به همراه یک نیرو لازم است مجموع انها برابر نیرویی است که از مرکز مقاومت می گذرد. نسبت نیرو/ گشتاور برابر10/1 باعث ایجاد حرکت انتقالی می شود شکل B14-4 این نوع حرکت را نشان می دهد. در این حرکت نواحی فشار در بافت های فضای پریودنتال به صورت یکنواخت وجود دارد.
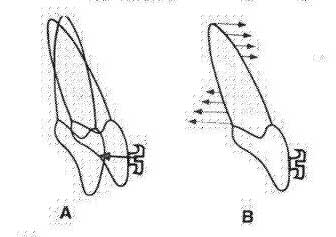
شکل 14-4 در شکل B حرکت انتقالی مشاهده می شود. در شکل B نواحی فشار در فضای پریودنتال همراه با حرکت انتقالی دیده می شود. در این حرکت نواحی فشار در تمام PDL به طور یکسان وارد می شود.
حرکت ریشه
حرکت ریشه، با نگهداشتن تاج دندانها و با کاربرد نیرو و گشتاور انجام می شود. مرکز چرخش دندان ها در لبه انسیزال یا در براکت است. حرکت ریشه به گشتاور بسیار زیادی احتیاج دارد. نسبت نیرو/ گشتاور باید در حدود یا بالاتر از 12/1 باشد.
شکلA,B 15-4 این نوع حرکت به همراه نواحی فشار در فضای پریودنتال را نشان می دهد. میزان فشار زیاد در انتهای ریشه باعث تحلیل قابل توجه استخوان می شود. وجود نواحی زیاد فشارundermining resorption را بوجود می اورد. و باعث سرعت حرکت ریشه می گردد. حرکت آهسته تر ریشه به طور موثری باعث تقویت تکیه گاه می گردد.
حرکت ریشه در درمان ارتودنسی به عنوان Torque شناخیه شده است. این نوع حرکت برای تصحیح محور طولی دندان های قدامی برای تصحیح موقعیت ریشه کانین ها بعد از بستن فضای دندان های در آورده شده ئ برای عمودی تر کردن محور طولی دندان های خلفی که در جهت مزیال Tip شده اند به کار می رود.
ثابت نگه داشتن تاج دندان ها یا بستن آنها به دندان های مجاور برای جلوگیری از حرکت آنها در مسیر مخالف بسیار مهم است. برا حرکت لینگوالی ریشه دندان های قدامی بالا نیرویی که در جهت قدام اعمال می شود. اغلب زیاد است و باعث جلو اوردن دندان های خلفی می شود (اثرrow-boat). برای جلوگیری از این اثر استفاده از هدگیر یا نیرویی در جهت دیستال مفید است.
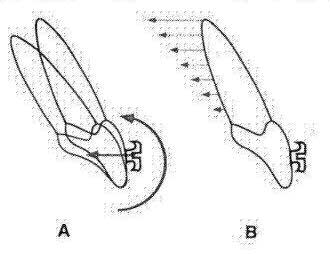
شکل 15-4 در این شکل حرکت ریشه مشاهده می شود. A در حرکت ریشه مرکز چرخش در لبه انسیزال قراردارد. B در این تصویر نواحی فشار در فضای پریودنتال دیده می شود و میزان فشار در انتهای ریشه در بیشترین مقدار است.
حرکت چرخشی
حرکت خالص چرخشی احتیاج به یک زوج نیرو دارد. اگر نیرو از مرکز مقاومت نگذرد حرکت چرخشی ایحاد می شود. این حرکت در درمان های ارتودنسی بسیار نورد احتیاج است. شکل 16-4مثالی از حرکت چرخشی را نشان می دهد.
تعادل سکون
کاربرد قوانین دینامیک نیوتن در رابطه با تعادل نیرو هایی که از دستگاه های ارتودنسی حاصل می شود اهمیت دارد. قوانین نیوتن شامل چندین اصل اساسی مکانیک است. سه قانون اصلی نیوتن عبارتند از :
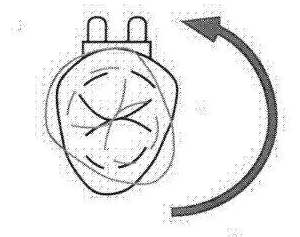
شکل 16-4 : در این شکل حرکت خالص جرخشی در اطراف مقاومت مشاهده می شود.
1-قانون اینرسی : جسمی که د رحالت سکون باشدو حالت ساکن خود را حفظ می کند و اگر حرکت یکنواخت در یک خط مستقیم دارد به این حرکت ادامه می دهد مگر این که نیرویی به آن وارد شود.
2-قانون شتاب : تغییرات در سرعت حرکت جسم با مقدار نیروی موثر در جهت حرکت جسم متناسب است.
3-قانون عمل و عکس العمل : برای هر عمل ، عکس العمل مساوی و مخالف وجود دارد.
به منظور به کار بردن این قوانین در هنگامی که یک وایر در شیار براکت نا مرتب بسته شود وایر باید انعطاف پذیر باشد تا در داخل براکت ها قرار گیرد. به محض این که دایر در براکت قرار گرفت قوانین اول و سوم نیوتن عملی می شوند.
در مرحله اول وایر و دندان ها به طور جداگانه در حالت تعادل و هر کدام بدون حرکت هستند ولی به بافت های فضای پریونتال فشاری وارد می شود که این فشار باعث عکس العمل بیولوژیکی لازم برای حرکت دندانها می گردد وایر انعطاف پذیر نیرویی را به دندانها وارد می کند و دندان ها نیرویی برابر و در خلاف جهت به وایر وارد می نمایند. با فعالیت ایجاد شده در دندانها و عکس العمل ایجاد شده در وایر نیروهای برابر و در خلاف جهت ایجاد می شوند و نیروی نهایی خنثی گردیده و حالت سکون لحظه ای ایجاد می گردد.
توجه بر اصل سوم نیوتن در ایجاد حالت تعادل اهمیت دارد. معنی ایت است که بر آیند نیروها و گشتاورها در هر نقطه ای از جسم مساوی صفر است یعنی نیرو یا گشتاوری بر یک جسم ثر نکند این جسم اثر نکند این جسم در حال سکون می ملند وایر فنر و دندانها بعنوان جسم می باشند . علم شاخه ای از مکانیک است که اثر نیروها بر جسم را در حالت سکون بحث می نماید.
تجزیه و تحلیل سیستم نیروی دستگاههای ارتودنسی با بکار بردن اصول تعادل در حال سکون در پیش بینی حرکت دندانها کمک می نماید. آنالیزهای تعادل می تواند به شکل معادله های زیر بیان گردد.
مجموعه نیروهای افقی=0 مجموعه گشتاورها در محور افقی=0
مجموعه نیروهای عمودی=0 مجموعه گشتاورها در محور عمودی=0
مجموعه نیروهای عرضی=0 مجموعه گشتاورها در محور عرضی=0
دستگاه cantilever بعنوان مثال می تواند این فرمول را شرح دهد.intrusion arch بصورت دیاگرام شماتیک از نمای باکال مشاهده می شود شکل 17-4 وایر intrusion را در داخل تیوب کمکی مولر نشان می دهد که به دندانهای قدامی متصل نشده است در شکل B وایر در تیوب کمکی مولر قرار دارد و به قسمت قدامی بسته شده ولی این وایر در داخل شیار براکت قرار داده نشده است.
همانگونه قبلا بیان شد باید مجموع ریاضی نیروها برابر صفر باشد. مولفه عمودی intrusion دندانهای قدامی با مولفه عمودی extrusiveدندان مولر یکدیگر را خنثی می کنند. تعادل در رابطه با نیروهای عمودی به وضوح دیده می شود. این دو نیروی عمودی باعث ایجاد یک زوج نیروی برابر می شوند که در یک جهت نمی باشند شکل 18-4 . محاسبه مقدار گشتاورها برابر با حاصل ضرب فاصله بین محل اثر نیروهای عمودی در میزان نیرو است.
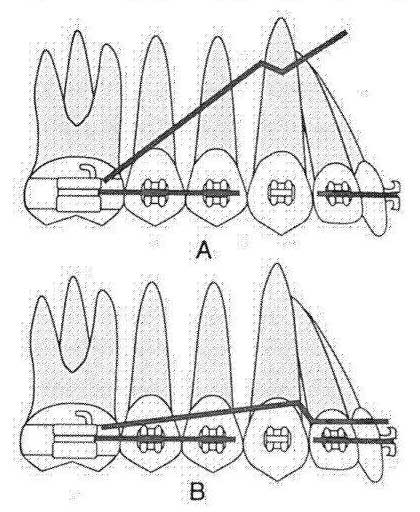
شکل 17-4 در این شکل دیاگرام شماتیک وایر intrusion مشاهده می شود. تصویر A شکل غیر فعال را نشان می دهد که وایر intrusion در تیوب مولر قرار دارد اما به دندانهای قدامی متصل نیست. در تصویر B وایر intrusion با اتصال به دندانهای قدامی فعال شده است.
شکل 18-4: سیستم نیرو ناشی از intrusion arch در حال تعادل است. و نیروهای عمودی با گشتاور در روی مولر در حالت تعادل می باشد.
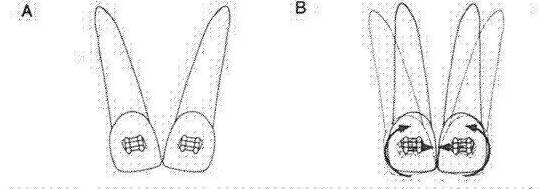
شکل 19-4 حالت تعادل سکون در یک دستگاه ارتودنسی را نشان می دهد. دو دندان قدامی به سوی همدیگر شده اند تماس در ناحیه لبه انسیزال این دندان ها وجود دارد اما محور طولی این دندانها در حالت صحیح قرار ندارد به طوری که ریشه ها از یکدیگر دور هستند. این حالت ممکن است در بستن اولیه دیاستم ایجاد شود. اگر دندانهای قدامی در جهت مزیال به طور مساوی شده باشند و براکت ها در موقعیت صحیح قرار داشته باشند. به منظور عمودی تر شدن دندانهای قدامی گشتاورهای برابر و مخالف همدیگر لازم است. برای حفظ تماس تاج ضروری است این دندانها با figure 8- به همدیگر وصل شوند نتایج کار با قرار دادن وایر مستقیم در شکل B19-4 دیده می شود.
بستن براکتها به صورت figure 8- باعث ایجاد نیروی افقی کوچکدر هر دندان قدامی می شوند. این نیروها در یک راستا و در مسیر مخالف یکدیگر عمل می کنند. بدین ترتیب تعادل انجام می پذیرد. در این مثال توسط وایر در هر دندان گشتاوری ایجاد می شود.گشتاورها از نظر اندازه برابر ولی در جهت مخالف هستند.
مثالهای داده شده نمونه های ساده ای برای شناخت تعادل سکون در یک دستگاه ارتودنسی است. گشتاورهای نامساوی باعث پیچیدگی در سیستم نیرو می شود. این حالت ممکن است در براکت های نامنظم و در خمیدگی های دور از مرکز V شکل یا gabel bends و با استفاده از فنرهای کمکی برای بستن فضا دیده می شود. هنگامی که مقدار گشتاورها برابر نیستند باید از یک نیروی اضافه برای مقابله با اختلاف موجود بین مقدار گشتاورها استفاده کرد. درخیلی از موارد این نیروی اضافی در مسیر عمودی قرار دارد نیرو های باعث تغییر در اکلوزال پلان می گردد. ارزیابی تعادل نیروها در تشخیص عوارض جانبی کمک می کند. شناخت تعادل سیستم نیروهای موجود در دستگاه ارتودنسی در پیش بینی نتایج درمان کمک می کند و در جهت پیش بینی حرکات دلخواه و عوارض نا مطلوب موثر است. شناخت عوارض مکانیمی باعث می شود قبل اینکه این عوارض ایجاد شوند برای جبران آنها در وایر مکانیک های لازم اعمال شود. وقتی دستگاه ارتودنسی در حال تعادل است باید به وجود نیروها و گشتاورها توجه کرد. حذف هر مولفه ای از سیستم نیرو باعث نادیده گرفتن نیرو یا گشتاور مقابل خواهد بود. دستگاه ارتودنسی و دندانها از قانون دوم نیوتن نیز پیروی می کنند. عوارض جانبی نیروها را نمی توان حذف کرد. برای به حداقل رساندن یا خنثی کردن این عوارض بایستی از روش های دیگر یا از دستگاه های ارتودنسی اضافی استفاده نمود.
شکل 19-4 : در این شکل بستن دیاستم با حرکت mesial tipping در دندانهای قدامی مشاهده می شود در تصویر A تاج دندانها در تماس با همدیگر هستند اما ریشه ها به میزان زیادی از همدیگر دور می باشند. در تصویر سیستم نیرو برای عمودی شدن دندانهای قدامی مشاهده می شود نیروها و گشتاورها از نظر مقدار برابرند ولی در مسیر مخالف هم قرار دارند.
توجه به خصوصیات ماده
وسایل اولیه ایجاد نیرو، وایرها، فنرها و کشها هستند. وایرها ، فنرها از هزاران آلیاژ ساخته می شوند. استینلس استیل با سابقه طولانی مدت همراه با آلیاژهای نیکل تیتانیوم مولیبدیوم و آلیاژهای دیگر برای ساختن وایر ها به کا می رود. دانستن خصوصیات اصلی ماده برای انتخاب وایر در درمان ضروری است. خواص مکانیکی یک ماده بستگی به چند فاکتور دارد. خصوصیات داخلی یکی از خصوصیات متالوژی وایر است. این خواص توسط ترکیب مواد در حالت مولکولی یا کریستالین بوجود می آید. تغییر در خواص داخلی می تواند خصوصیات آلیاژ را تغییر دهد. خواص خارجی بستگی به خصوصیات ماکروسکوپیک ماده مثل قطریا وایر دارد متخصصین ارتودنسی می توانند این خصوصیات را تعیین کنند.
ویژگی های اصلی مواد توسط منحنی کشش فشار یا به تصویر کشیده شده است. چند خصوصیت کلیدی در منحنی مشخصات کلینیکی وایر را نشان می دهد.
دیاگرام کشش فشار، مقدار یا نیرو یا استرسی را که در یک ماده به کار میروند تابه تغییر شکل یا کشش برسد شرح می دهد. دو ناحیه از منحنی یعنی ناحیه الاستیک و ناحیه پلاستیک شرح داده می شود. ناحیه الاستیک منطقه خطی از منحنی است که تغییر شکل در ماده در این ناحیه موقتی است یعنی با برداشتن فشار ماده به شکل ائلیه اش بر میگردد. تغییر شکل در ماده بعد از ناحیه الستیک باعث تغییر شکل دائم ماده می گردد یعنی شکل ماده تغییر می کند درمانهای ارتودنسی وایرها و فنرها اصولا در ناحیه الستیک به کار برده می شوند.
قسمت سراشیبی ناحیه الاستیک از منحنی فشار-کشش است که سختی یا انعطاف پذیری وایر را نشان می دهد. کشش فشار از خصوصیات داخلی آلیاژ است. به عبارت دیگر جزو خصوصیات ذاتی آلیاژ است. معادل کلینیکی وایر است. میزان بستگی به خصوصیات داخلی و خارجی وایر مثل قطر طول و میزان فشار و غیره دارد.
یک وایر انعطاف پذیر دارای شیب کم در ناحیه الاستیک اس در حالی که یک وایر بسیار سخت دارای شیب زیاد می باشد. هرچه پایین تر باشد نیروی برای خم شدن هر واحد سیم لازم است یعنی وایر بسیار انعطاف پذیر می باشند یعنی برای خم کردن هر واحد از آنها نیروی زیادی لازم است.
حد الاستیک به عنوان proportional limit یا نقطه تسلیم نامیده می شود. در این نقطه نیری بیش از آن باعث تغییر شکل دائم وایر می گردد. از نظر عملی نقطه تسلیم در جایی قرار دارد که 1/0% از تغییر در وایر ایجاد شود. بعد از حد الاستیک به ناحیه پلاستیک میرسیم. معمولا تغییر شکل دائم وایر بعد از حد الاستیک ایجاد خم در وایر می کند. میزان تغییر شکل در وایر تا حد الاستیک نشان دهنده ناحیه الاستیک در وایر است . این خصوصیات از نظر کلینیکی میزان فعال کردن وایر یا فنر را مشخص می نماید و هر چه ناحیه الاستیک وایر بیشتر باشد میتواند وایر را بیشتر فعال کرد.
وایر قسمت قله منحنی در ناحیه پلاستیک است. یعنی بالاترین فشاری است که یک ماده می تواند در برابر آن مقاومت نماید. با تغییر شکل بعد از خصوصیات وایر تغییر می کند. اگر وایر به اندازه کافی تغییر شکل پیدا کند نقطه شکست حاصل می شود و وایر می شکند. محدوده ای را که ماده به شکل اولیه خودش بعد از برداشت فشار می رسد به نام spring back ماده می شود.
خصوصیات منحنی کشش فشار با خصوصیت داخلی ماده مشخص می گردد. اهمیت کلینیکی منحنی load deflection بستگی به خواص داخلی و خارجی وایر دارد. قطر وایر و فشار بروی وخواص load deflection وایر تاثیر می گذارد. از خواص الاستیک وایر برای حرکت دندان استفاده می شود. به طور کلی کاهش قطر وایر باعث کاهش میزان load deflection می شود. افزایش طول وایر منجر به کاهش load deflection می گردد. افزایش طول وایر با افزایش فاصله بین براکتها روشی برای افزایش فعالیت وایر و کاهش میزان load deflection است. هرقدر میزان load deflection پایین تر باشد ثبات و پایداری نیرو بیشتر است.
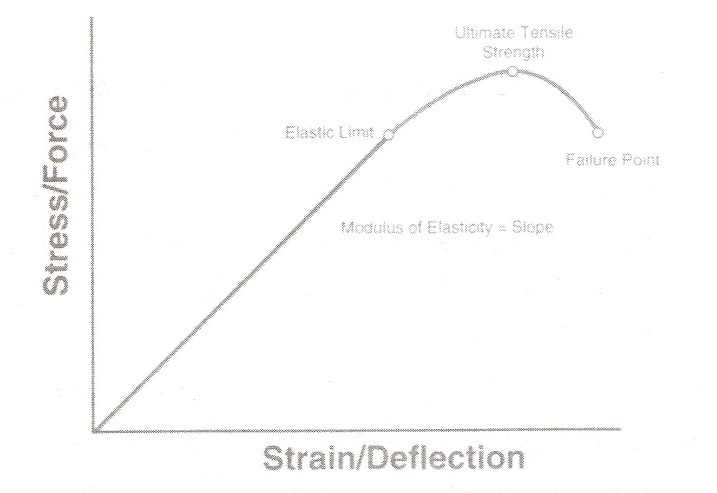
شکل 20-4 : در این تصویر دیا گرام کشش-فشار برای یک وایر ارتودنسی مشاهده میشود به محتویات کتاب برای شرح خصوصیات بیشتر منحنی مراجعه شود.
ملاحظات در طرح دستگاه ارتودنسی
درمانهای ارتودنسی ایده آل اهداف اختصاصی از قبل تعیین شده را تامین می نماید. سه قسمت عمده درمان شامل موارد زیر است:
1-تشخیص در تشخیص مشکل بیماری که احتیاج به درمان دارد مشخص می گردد.
2-طرح درمان ، طرح درمان برای بدست آوردن اهداف درمان و رسیدن به نتایج نهایی به اجرا در می آید.
3-درمان ، زمان درمان برای رفع ناراحتی بیمار و رسیدن به اهداف مورد توجه قرار میگیرد.
اصول بالا این معنی را می رساند که بیماران مختلف، نیاز به درمانهای متفاوت دارند. طرح یک دستگاه ارتونسی قادر به برطرف کردن ناراحتی های تمام بیماران نیست. به کار بردن اصول بیومکانیک در دستگاه های ارتودنسی نتایج درمان را بهبود می بخشد. طرح براکت یا روش درمان به تنهایی نمی تواند اهداف درمان را تامین کند. فقط متخصص ارتودنسی می تواند نقش تعیین کننده ای در کنترل خصوصیات سیستم نیرو در حین درمان داشته باشد.
عوامل مخصوص
اندازه نیرو بر اساس کم یا زیاد بودن آن تعیین می گردد. درمان ایده آل نیاز به نیرویی در محدوده مناسب دارد. این ویژگی برای ایجاد عکس العمل های بیولوژیکی بدون این که عارضه ای ایجاد کند لازم است. اکثرا اصطلاح نیروی مناسب به کار برده می شود. نیروی ملایمی است که دندان را به موقعیت مورد نظر در کوتاه ترین زمان و بدون هیچ عارضه نامطلوبی حرکت می دهد. متاسفانه اندازه گیری درستی از نیروی مناسب وجود ندارد. نیرو تا حدود دو گرم می تواند باعث حرکت دندان شود. در حالی که هدگیر و دستگاه های ارتوپدیک بالاتر از 500 گرم نیرو تولید می کنند. Kloehn در اواخر سالهلی 1940 استفاده از نیرویی تا میزان 500 گرم توسط هدگیر cervical را گزارش نمود.
پایداری نیرو عبارت است از دوام نیروی اعمال شده در مدت فعالیت دستگاه ارتودنسی است برای حرکت دندان در فاصله بیشتر دوام و استمرار مقدار نیرو همیشه مورد توجه قرار می گیرد . پایداری نیرو می تواند توسط کاهش میزان load deflection با روش های زیر ایجاد شود .
کاهش قطر وایر
افزایش فاصله بین براکت ها
افزایش طول وایر مثل افزایش تعداد لوپها
استفاده از الیاژهای با حافظه
کاهش قطر وایر
اغلب کاهش قطر وایر برای افزایش دوام نیرو و کاهش load deflection به کار می رود قطر کم و انعطاف پذیری زیاد وایر موجب تسهیل قرار گرفتن وایر درداخل شیار براکت می شود . این امر مخصوصا در load deflection مرحله اولیه درمان که دندان ها نامرتب می باشند مورد توجه است. قطر کم وایر کنترل حرکت دندان در سه پلان فضایی را کاهش می دهد .
قطر زیاد وایر باعث ایجاد تماس بهتر وایر یا براکت می شود و منجر به کنترل بهتر دندان خواهد شد ولی در مقابل load deflection بیشتر می شود و مقدار زیادی نیرو ایجاد خواهد کرد. وایرهای با قطر زیاد و وایرهای چهارگوش حرکت در سه بعد را بهتر کنترل می نمایند ولی سفتی زیاد وایر باعث کم شدن فعالیت و افزایش load deflection می گردد. این ویژگی باعث کنترل مطلوب حرکات جزئی در پایان درمان می شود در مرحله اولیه درمان به منظور افزایش تکیه گاه استفاده از وایر با قطر زیاد توصیه می شود.
افزایش فاصله بین براکت ها
افزایش فاصله بین براکت ها باعث کاهش load deflection می شود و در ایجاد یک نیروی پایدار کمک می کند و باعث تسهیل حرکت دندانها می گردد . هرچه طول وایر بیشتر باشد انعطاف پذیری وایر بیشتر می شود و برای بیشتر شدن دوام نیرو تعداد زیادی از براکت ها و فنرهای کمکی طوری طراحی شده اند که فاصله بین براکت ها زیاد گردد یک مثال کلینیکی برای افزایش فاصله بین براکتها استفاده از یک فنر ساده است بطوری که از مولر اول با عبور از چند دنان حرکت دندانی را بوجود می اورد.
ساختن لوپها در وایر
قبل از معرفی الیاژهای با حافظه شایع ترین روش برای کاهش load deflection قرار دادن لوپها در وایر بود اکثر لوپهای وارد شده در ارتودنسی لوپهای ساده هستند . این لوپ ها باعث افزایش طول وایر می گردد بطوری که load deflection کاهش می یابد . در یک دستگاه ارتودنسی از نظر بیومکانیک طراحی مناسب لوپها بطور موثری باعث کاهش میزان load deflection و کاهش تغییر شکل وایر می گردد دقت در ساختن لوپ ها و به کار بردن وایر بیشتر در ناحیه لوپها باعث افزایش کارایی لوپ ها می شود.
الیاژهای باحافظه
در 15 سال گذشته استفاده از الیاژهای با حافظه مثل نیکل تیتانیوم که بطور موثری باعث کاهش load deflection می گردد یکی از نکات مهم در ارتودنسی بوده است در حال حاضر الیاژهای با حافظه دارای قطر زیاد در ابتدای درمان برای کنترل بهتر حرکت بکار برده می شود وایر نیکل تیتانیوم به میزان قابل توجهی کمتری از وایرهای استینلس استیل دارد . کاهش در modulus of elasticity به میزان تقریبی 1 به 1 باعث کاهش میزان load deflection در وایر می گردد.
اندازه گشتاور و دوام ان باید مورد توجه واقع شود میزان نیرو و میزان گشتاور نسبت نیرو/گشتاور را بوجود می اورد همانگونه که قبلا بحث شد نسبت نیرو / گشتاور نوع حرکت را تعیین می کند . نیروی خالصی که به تاج یا براکت ها وارد می شود باعث ایجاد حرکت چرخشی انتقالی غیرقابل کنترل می گردد . به عبارت دیگر تاج و انتهای ریشه در جهت مخالف یکدیگر حرکت می کنند کاربرد گشتاور خالص باعث چرخش حرکت دندان حول مرک مقاومت می شود . کاربرد همزمان نیرو و گشتاور باعث ایجاد انواع مختلف حرکات دندانی می گردد در بسیاری از موارد کشتاور در اثر اعامل نیرو وایر به براکت ایجاد می شود . در حالی که نیرو از طریق کش ها یا فنرها اعمال می گردد.
نحوه پخش نیرو در سرتاسر فضای پریودنتال نوع و میزان حرکت دندانی را مشخص می نماید . تعداد دندانهایی که نیرو بر انها اعمال می شوند . میزان نیرو میزان گشتاور نسبت نیرو/گشتاور نوع و مقدار حرکت دندانی را مشخص می کند
نقطه محل اثر نیرو بسیار مهم است در اغلب موارد این اصل در طرح دستگاه نادیده گرفته میشود. محل اثر نیرو و مسیر نیرو نسبت به مرکز مقاومت دندان در نوع حرکت اثر قابل توجهی دارد. نیروهایی که با فاصله از مرکز مقاومت اعمال میشوند گشتاورهایی ایجاد میکنند که پتانسیل ایجاد حرکات ناخواسته دارند.
این مطلب توسط چند مثال ساده بیان میشود شکل 22-4 چهار نوع مختلف محور طولی در سانترال فک بالا را نشان می دهد در شکل A دندان دارای محور طولی ایده آل است در شکلB دندان به طور عمودی است در شکل C به طور قابل توجهی مایل است ودر شکل D به صورت لینگوالی واقع شده است. در هر چهار مثال یک نیروی مساوی intrude کننده به دندانها وارد میشود. شکلهای A,B,C 22-4 مسیر نیرو نسبت به مرکز مقاومت را نشان می دهد هر چه نیرو لبیالی تر باشد گشتاور بیشتر است که باعث می شود ریشه بطرف لینگوال و تاج بطرف باکال حرکت نماید. بدین ترتیب در این مثال مسیر و میزان نبروها شبیه یکدیگر است ولی نوع پاسخ کاملا متفاوت است.
برعکس در شکل D 22-4 اعمال نیروی intrusive به دندان سانترالی که در سمت لینگوال به شدت tip شده است گشتاوری در خلاف جهت گشتاور در خلاف جهت گشتاور شکلهای A,B,C به وجود می آید. بعلت این که مسیر نیرو نسبت به مرکز مقاومت در سمت لینگوال است نیرو باعث میشود بجای این که موقعیت دندان اصلاح شوددر جهت لینگوال tip گردد.
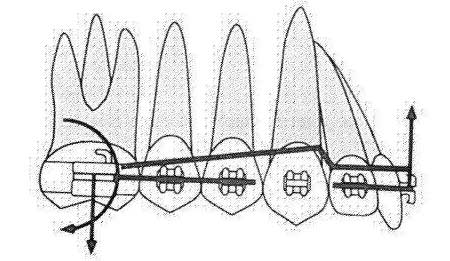
یک مثال در کاربرد این اصول intrusion arch است. intrusion arch یک وسیله کمکی برای intrude کردن دندانهای قدامی همراه با tip back مولر است. طرح این سیستم در شکل 23-4 نشان داده شده است(همانند شکل 18-4). intrusion arch به قسمت قدامی متصل است و باعث ایجاد نیروی عمودی در نقطه اتصال آن به دندانهای قدامی می گردد. فاصله زیاد بین براکتها باعث افزایش محدوده فعالیت و کاهش میزان نیرو می گردد ولیکن پایداری و دوام نیرو افزایش می یابد. جهت اثر نیرو بر اساس محور طولی دندانهای قدامی می تواند تغییر کند(شکل 24-4 و 25-4). با وجود یک یا دو دندان اندازه گیری نیرو امکان پذیر است. محاسبه گشتاور tip back که بر روی مولرها عمل می کند برابر با حاصل ضرب نیرو در فاصله بین محل اثر دو نیروی عمودی است. این وسیله نمونه واضخی از دستگاه cantilever است. شکل 26-4 سیستم دستگاه ارتودنسی cantilever برای extrusion کانین نهفته فک بالا را نشان می دهد.
ملاحظات بیومکانیکی برای مقایسه هدگیر پشت گردنی در برابر هدگیر پشت سری بسیار مهم است. شکل A,B,C,D 27-4 دیاگرام از هدگیر پشت گردنی و پشت سری می باشد. مسیر نیرو در هدگیر پشت گردنی نسبت به مرکز مقاومت مولر یا فک بالا در سمت پایین است(شکلB 27-4) نیرو به دو مولفه افقی و عمودی تجزیه می شود. مولفه عمودی نیروی extrusion است(که در جهت پایین قرار دارد). و مولفه افقی دیستالی است( در جهت عقب می باشد). به طور مشابه اشکال C,D 27-4 نیروی ناشی از هدگیر پشت سری را نشان می دهند. مسیر نیرو از میان مرکز مقاومت عبور می کند( شکل C 27-4). بنابراین گشتاور ایجاد نمی شود. شکل D 27-4 نشان می دهد که مولفه های افقی و عمودی نیرو به صورت دیستال (در جهت خلفی) و به صورت intrusive (در جهت فوقانی) واقع شده اند.
اگر چه هر دو وسیله هدگیر است ولی خصوصیات بیومکانیکی آنها متفاوت است و بر اساس نیاز خاص بیمار هر کدام از این وسیله ها می تواند انتخاب گردد.
شکل 21-4 در این تصویر افزایش فاصله بین براکتها در طرح دستگاه ارتودنسی مشاهده می شود.
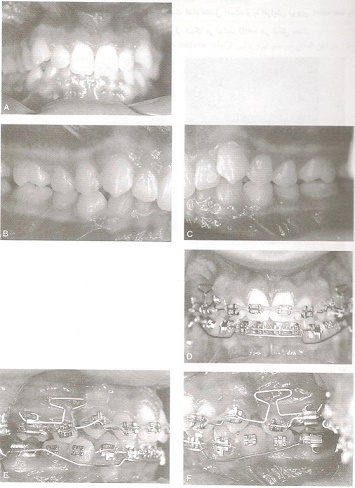
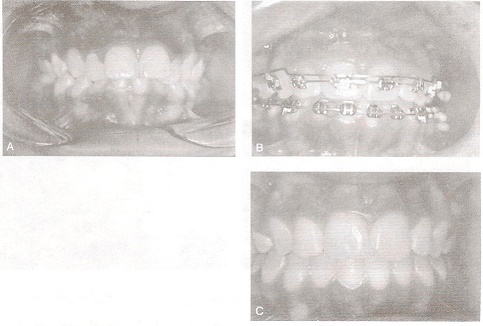
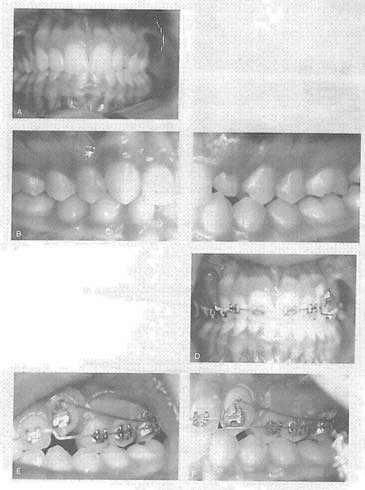
در تصویر C,B,A نمای داخل دهانی بیمار با بایت عمیق و رابطه مولر cI II را نشان می دهد. اکلوزال پلان خلفی با level دندانهای قدامی به صورت قابل توجه ای اختلاف دارد. در تصویر F,E,D نمای داخل دهانی را نشان می دهد که توسط segmental-T-loop فضای دندان در آورده شده در فک بالا بسته شده است. T-loop قبل از قرار دادن در دهان دارای نیروی افقی و عمودی و گشتاور قدای و خلفی است. این طرحT-loop از پیش ساخته شده با فاصله بزرگ بین دو اتصال می تواند دندان را حرکت دهد. در فک پایین یک وایر intrusion وجود دارد اما در این جا برای عمودی کردن مولر به کار برده شده است چون در ناحیه کانین ها به قسمت قدام متصل است و با افزایش نیروی intrusive باعث ایجاد گشتاور بزرگی در روی مولر می شود و به عمودی کردن مولر کمک مینماید.
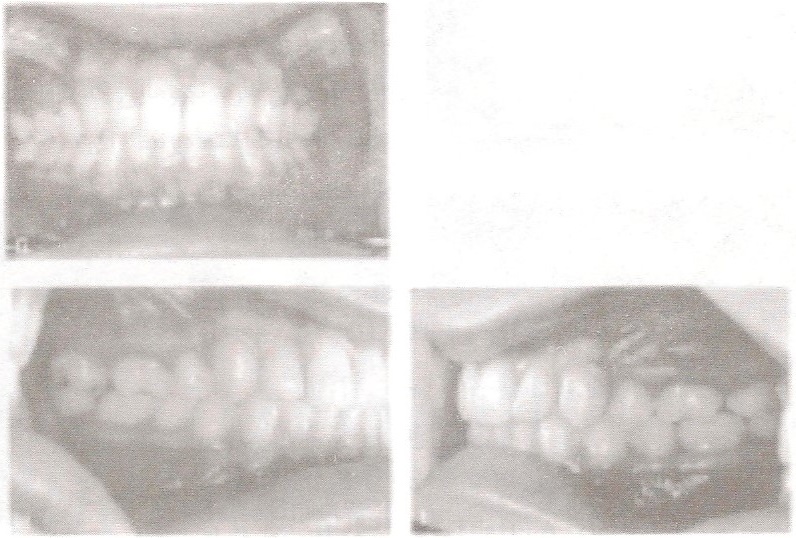
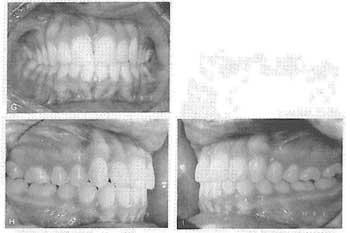
شکل 21-4: در تصویر I,H,G بیمار در انتهای درمان با overbite و اکلوزال پلان و interdigitation مناسب قسمت خلقی مشاهده می شود.
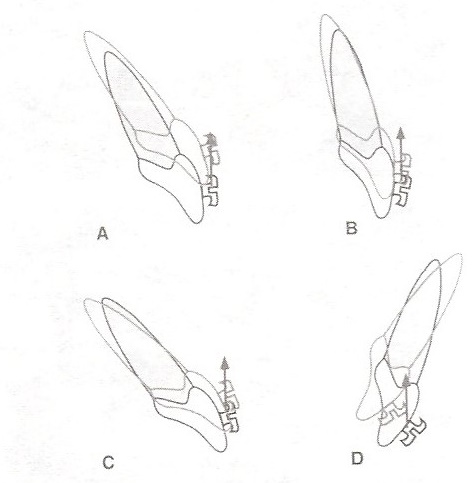
شکل 22-4 : در این شکل اثر محور طولی و موقعیت محل اثر نیرو بر روی حرکت دندانی مشاهده می شود. نیروی intrusive بر روی دندان قدامی در تصویر A با محور طولی طبیعت در تصویر B با محور طولی عمودی قرار گرفته و در تصویر C با محور طولی در دندانی که بیرون زده شده است و در تصویر D با دندانی که در جهت لینگوال واقع شده است مشاهده می گردد.
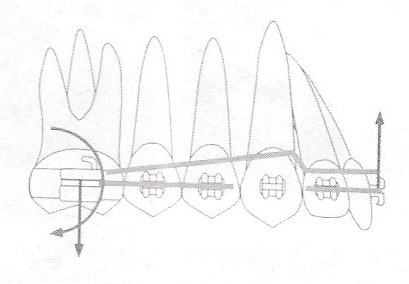
شکل 23-4 : در این شکل سیستم نیرو ناشی از وایر intrude کننده دیده می شود.
شکل 24-4: در این شکل وایر intrude کننده مشاهده می شود. تصویر A نمای قدامی داخل دهانی از بیماری با بایت عمیق را نشان می دهد. در تصویر B نمای قدامی وایر intrude کننده که به قسمت قدام بسته شده است وچهار دندان قدامی فک بالا که به صورت یک واحد در آمده است مشاهده می گردد. محل اثر نیرو بین دندانهای سانترال است که در قسمت قدام مرکز مقاومت قرار دارد. در تصویر C همان بیمار با نمای قدامی overbite تصحیح شده مشاهده می گردد.

شکل 25-4: در این شکل مثالی از وایر سه قسمتی intrude کننده مشاهده می شود. محل اثر نیرو به مرکز مقاومت قسمت قدامی نزدیکتر است. در شکل B,A تصویر داخل دهانی اولیه از نمای فرونتال و باکال سمت چپ مشاهده می شود. در شکل C و D وایر intrude کننده سه قسمتی مشاهده می گردد. به محل قلاب ها در دیستال لترال توجه نمائید. تصویر E وF نمای فرونتال و باکال سمت چپ را نشان می دهد.
شکل 26-4: در این تصویر دستگاه cantilever برای extrusion دندان کانین بکار رفته است. در تصویر C , B ,A نمای داخل دهانی بیمار با دندان ها ی کانین شیری باقی مانده و کانین دائم مشاهده می شود. در شکلهای F, E, D نمای داخل دهانی همراه با band و bond دندان ها مشاهده می گردد. دندان کانین از وایر اصلی bypass شده است و یک دستگاه cantilever از ناحیه مولر برای رویش و هدایت کانین به موقعیت مناسب در قوس به کاربرده شده است.
شکل26-4: در تصویر I ,H, G نمای داخل دهانی در انتهای درمان با موقعیت مناسب کانین ها مشاهده می شود.
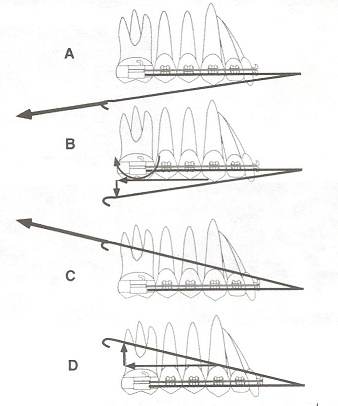
شکل 27-4: در این تصویر شکل هدگیر پشت گردنی و پشت سری مشاهده می شود.
در تصویر A نیروی ایجاد شده توسط هدگیر پشت گردنی نشان داده شده است. در تصویر B گشتاور tip back (قرمز) و مولفه نیرو(آبی) از هدگیر پشت گردنی نشان داده شده است. در تصویر C نیروی ایجاد شده توسط هدگیر پشت سری مشاهده می شود. در تصویر D مولفه های نیرو ناشی از هدگیر پشت سری دیده می شود.
خلاصه
اصول بیومکانیک مکانیسم عمل دستگاه ارتودنسی را شرح می دهد. و این اصول اهمیت اساسی در مراحل درمان ارتودنسی دارند. شناخت اصول بیومکانیک در کارآیی و قابل اجرا بودن طرح درمان سودمند است.
دانلود فصل چهارم (اصول بیومکانیک) از کتاب اصول بیومکانیک ناندا در دستگاههای ارتودنسی انتشارات سوگند