حرکت دندان به منظور بستن فضا یکی از مطلوب ترین اهداف درمان ارتودنتیک است. ارتودنتیست ها برای سالیان متعددی در جستجوی سیستم نیروی موثری بوده اند که بتواند در بستن فضاهای extraction به نحو سریع، دقیق و اثربخشی عمل کند. حرکت ارتودنتیک دندان، نتیجه ی اعمال کنترل شده ی نیروهای مکانیکی به دندان و پریودونشیوم است. تحریک ایجاد شده توسط دستگاههای ارتودنسی فعال، نیروی مکانیکی لازم برای ایجاد یک پاسخ بیولوژیک را تامین می نماید. این تداخل، به طور موقتی تعادل فیزیولوژیک مجموعه دندانی-صورتی را به هم ریخته و منجر به حرکت دندان در جهت نیروی خالص و بسته شدن فضا می گردد.
برای انجام چنین حرکاتی، باید وسایل ارتودنتیک را بر اساس پاسخهای بیولوژیک پریودنشیوم احاطه کننده ی دندان (که هنوز به صورت یک علم دقیقه –علم قابل اندازه گیری- در نیامده است) و خصوصیات مکانیکی آنها، و هم چنین ابزارهایی که برای حرکت دادنشان مورد استفاده قرار می گیرد (که یک علم دقیقه و قابل اندازه گیری است) انتخاب نمود. انتخاب این دستگاه ها نباید بر پایه ی گزارش های موردی از درمان های موفقیت آمیز صورت گیرد، چرا که به ندرت شکست درمان را گزارش می کنند. بنابرین در این فصل از نشان دادن موارد متعدد بالینی (که بسیاری از ارتودنتیست ها به فراوانی با آنها مواجهند) خود داری شده و در عوض دانش پایه ی بستن ارتودنتیک فضا مورد بحث قرار گرفته است.
اصول بنیادی بستن فضا
قبل از آغاز توضیح جزئیات مکانیک های دخیل در بستن فضا، بهتر است اصول پایه ی روش بستن فضا را به طور جامعی آنالیز نمود.
مفاهیم پایه
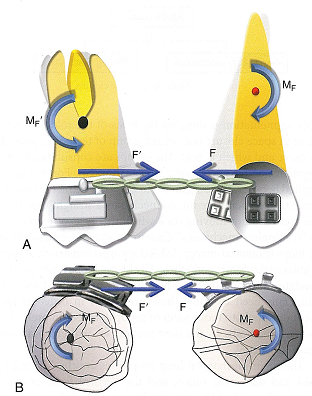
هدف در بستن فضا ساده بوده و شامل کنار هم آوردن دندان ها یا قسمت های دندانی، از طریق اعمال نیرو در بین آنها است. این نیرو اغلب بر براکت متصل به تاج دندان ها اعمال شده (تصویر1-6) و نسبت مرکز مقاومت واحد های تحت نیرو، در اکلوزال و باکال قرار دارد. این طراحی، گشتاورهایی را ایجاد می نماید (گشتاور ناشی از نیرو یا MF)، که منجر به tipping و چرخش دندانها در جهت نیروی اعمال شده می گردد. میزان tipping و چرخشی که از نظر بالینی مشاهده می گردد، وابسته به میزان بستن فضا خواهد بود. میزان بالاتر فضا منجر به اثرات سوء بیشتر می شود. میزان فضای نیازمند به تصحیح، می تواند بسته به شدت آن تغییر نماید. فضای زیر 2 میلیمتر، خفیف، 2-4 میلیمتر، متوسط و بالای 4 میلیمتر، شدید در نظر گرفته می شود. فضاهای بزرگ نیازمند کنترل انکورج خوب، در حین حرکت مطلوب دندان ها هستند (یعنی کنترل موثرگشتاورهای ناخواسته ی ایجاد شده حین بستن فضا، که منجر به tipping و چرخش می شوند). تقریباً می توان به هر حرکت مطلوب دندانی با استفاده دستگاههای موثر مکانیکی و کاربرد صحیح اصول آموخته شده در فصل 4 ، دست یافت. به اختصار، می توان طبیعیت حرکت دندان را با اعمال یک گشتاور متقابل (MC) در برابر MF کنترل نمود. می توان tipping نشان داده شده در تصویر 1-6 را با MC کنترل نمود. آسانترین راه ایجاد این MC ، قرار دادن یک سیم مستقیم درون براکت های زاویه دار است (تصویر 2-6). نسبت این گشتاور به نیرو (MC/F ratio) در براکت ارتودنتیک، قادر به ایجاد انواع مختلفی از حرکات دندان ها است. با این وجود، نوع حرکت دندانی که حین بستن فضا مشاهده می شود، وابسته به خود دندان و اهداف کلی درمان، نیز هست. برای مثال، در مورد کانین ها و مولرها به حرکت translation نیاز داریم، در حالیکه حرکت tipping ساده برای دندان های قدامی یا ثنایا به خوبی عمل می کند. حرکت ریشه به طور شایعی برای alignment نهایی ریشه ها خصوصاً حین finishing مورد نیاز است. همانگونه که در بخش بعد خواهیم دید، تمام این حرکات نیازمند MC/F ratio های متفاوتی هستند.
نسبت گشتاور به نیرو (M/F ratio)
نسبت گشتاور به نیرو، راه خوبی برای توصیف یا پیش بینی کیفیت حرکت دندان است. طبق تحقیقات موجود، نسبت گشتاور به نیرو پنج به یک (M/F ratio of 5:1) برای حرکت tipping ، نسبت هفت به یک (M/F ratio of 7:1) برای حرکت tipping کنترل شده، نسبت ده به یک (M/F ratio of 10:1) برای حرکت translation، و نسبت دوازده به یک (M/F ratio of 12:1) برای تصحیح ریشه، مورد نیاز است. با این وجود، نمی توان این نسبت ها را به صورت یکسانی برای تمام دندانها و در تمام شرایط بالینی به کار برد. برای مثال نسبت ده به یک، باعث translation یک دندان تک ریشه، تحت نیروی 100 گرمی می شود که براکت یا نقطه ی اعمال نیرو به آن در 10 میلیمتری از CRES دندان واقع باشد. راه کلی تری تعیین M/F ratio در حرکت دندان، باید به جای استفاده از یک روش کمّی از روشی کیفی تبعیت نماید. نسبت های M/F بالا، متوسط و پایین، به نحو مناسبی این کار را انجام می دهند.
همان گونه که در فصل 4 و نیز در تصویر 1-6 نشان داده شده است، اعمال نیروی منفرد در براکت یک دندان منجر به tipping کنترل نشده (با مرکز چرخشی اندکی اپیکال تر از مرکز مقاومت دندان) می گردد. اعمال گشتاور کوپلس (MC) که به اندازه ی کافی بزرگ باشد، احتمالاً قادر به خنثی کردن MF است. (نکته: در تصویر 2-6، MC در صورتی تولید می شود که دو انتها و گوشه های مقابل براکت با سیم قرار داده شده درون slot تماس پیدا کنند.) این روند منجر به translation می گردد. افزایش بیشتر MC ، باعث حرکت ریشه در فضا می شود. در این نسبت های M/F نسبتاً بالا، استرس ها به طور یکنواخت تری در تمام ریشه توزیع شده و حین فعال سازی دستگاه با حداقل تغییرات در خصوصیات مکانیکی مواجهیم؛ بنابرین آسیب های وارده به دندان ها و بافت های احاطه کننده کاهش می یابند. یک MC متوسط، تنها قسمتی از MF را خنثی کرده، منجر به tipping کنترل شده و بی حرکت باقی ماندن اپکس می گردد. از این بحث پیدا است که تنظیم نسبت MC/F یا Mc/MF ، کلید فراهم ساختن انواع مختلف حرکات دندانی در بستن فضا است.
لینک دانلود اساس بیومکانیک بستن فضای Extraction قسمت1 انتشارات آرتین طب