
دانلود Pdf در انتهای فصل
نیرو یا force عبارت است از اثر یک جسم بر جسم دیگر. این اثر می تواند بصورت کشش یا فشار باشد و می تواند شکل و موقعیت جسم را تغییر دهد . یک نیرو دارای مقدار magnitude و جهت direction می باشد. اندازه، نیرو، مقدار ان را مشخص می کند و جهت نیرو بر اساس جهت اثر line of action محل اثر poin of application. مبدا اثر point of origin و راستا sense مشخص گردد. براساس اصل اول نیوتون اگر یک نیرو بر جسمی وارد شود و برایند نیروها صفر باشد درصورتیکه جسم ساکن باشد به حالت سکون باقی می ماند و در صورتیکه در حال حرکت باشد حرکت ان بصورت یکنواخت و یا سرعت ثابت ادامه می یابد.
Stress : نشان دهنده مقاومت داخلی یک جسم در برابر اعمال نیرو می باشد. به عبارت دیگر stress توزیع نیرو بر جسم می باشد که بر اساس نیرو بر واحد سطح انداطه گیری می شود. در حقیقت stress معادل استحکام و یا strength یک جسم قلمداد می شود.
Strain : نشان دهنده تغییراتی است که در شکل و اندازه یک جسم به علت اثر یک نیرو بوجود می آید. به عبارت دیگر strain تغییرات جسم می باشد که بر اساس نیرو بر واحد طول اندازه گیری می شود.
حالت استاتیک : حالتی است که وقتی جسم تحت تاثیر یک نیرو قرار می گیرد و شکل جسم تغییر نماید در صورتیکه نیرو برداشته شود . جسم به حالت اولیه خود برنمی گردد. به عبارت دیگر تغییر شکل در دوره پلاستیک به صورت دائم است و برگشت پذیر نمی باشد.
برای خم کردن وایر توسط پلایر ارتودنسی از خصوصیات پلاستیک استفاده می شود به عبارت دیگر وایر باید در منطقه پلاستیک قرار گیرد که بتواند فرم مورد نطر را بگیرد و برای اینکه وایر بصورت فعال در دهان قرار گیرد از خصوصیات الاستیک وایر استفاده می شود.
Deformation : تغییراتی است که در شکل جسم بر اثر اعمال نیرو ایجاد می شود. این تغییرات معمولا در منطقه پلاستیک وایر قابل انجام است.
Resilience: الاستیسیته یک جسم یا مقاومت یک جسم در مقابل تغییرات دائمی می باشد که در منطقه الاستیک وایر قابل انجام است. بعضی از مولفین الاستیسیته را فنریت یا Springness می نامند.
Stiffness : مقاومت خم شدن وایر در برابر نیرو نامیده می شود. به عبارت دیگر رابطه معکوس با فنریت springiness دارد.
Ductility : عبارت است از حدی که یک جسم می تواند کشش پیدا کند بدون اینکه دچار شکستگی شود. Ductility برعکس شکنندگی Brittleness است.
Tensile Strength : مقاومت یک جسم در مقابل شکنندگی می باشد.
تمام اجسام دارای مرکز ثقل center of mass هستند. مرکز ثقل نقطه ای ست که اگر نیرویی از ان بگذرد جسم در فضا بصورت تنهایی یا انتقالی بدون هیچگونه چرخش حرکت می نماید. به عبارت دیگر می توان گفت مرکز ثقل جسم در حالت استقرار بعنوان نقطه تعادل یا balance point جسم می باشد. شکل 1-1 مرکز ثقل جسم ازاد را نشان می دهد.
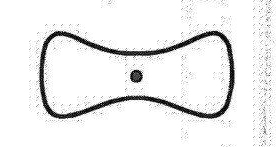
شکل 1-1 در این شکل مرکز ثقل یک جسم ازاد مشاهده می شود.
مرکز ثقل دندان را می توان با فرمول های ریاضی محاسبه کرد، ولی چون دندان به توان یک جسم مستقل محسوب نمی شود و در فضای پریودنتال قرار می گیرد، لذا در نظر گرفتن مرکز ثقل به تنهایی در حرکتهای ارتودنسی صحیح نمی باشد. مرکز ثقل جسم در مکانیک به عنوان mechanical axis معرفی می شود و در نتیجه مقاومت بافتهای نگهدارنده دندان biological axis بستگی به عوامل زیادی از جمله وسعت فضای پریودنتال، المانهای سلولی موجود در PDL،کشش لیگامانهای پریودنتال فشار مایع بین بافتی و تراکم ساختمانی دارد. دندانی که توسط بافت پریودنتال نگهداری می شود بعنوان جسم ازاد تلقی نمی گردد. برای اجسامی که ازاد نیستند همان نقطه تعادل balance point است.
اثر نیروها روی اجسام
اگر نیرو روی یک جسم اثر نماید. این نیرو از مرکز جسم عبور کند حرکت انتقالی بوجود خواهد امد یعنی جسم با حفظ موقعیت فضایی خود در جهت نیرو حرکت می کند که به ان حرکت تنه ای یا انتقالی translatory می گویند این حرکت در درمانهای ارتودنسی حرکتی ایده ال می باشد.
اگر نیرو روی یک جسم اثر نماید و این نیرو از مرکز جسم اثر نکند جسم مذکور حرکتی خواهد داشت که همراه با چرخش حول مرکز مقاومت می باشد این حرکت ، چرخشی انتقالی نام دارد و به ان translatory rotational movment می گویند در درمانهای ارتودنسی معمولا نیروهای ارتدنسی قادر نیستند از مرکز مقاومت دندان بگذرند لذا ذر بیشتر حرکات دندان بصورت چرخشی، انتقالی می باشد . که به ان tipping movment می گویند . البته باید دانست که با ایجاد تغییراتی در دستگاههای ارتودنسی و استفاده از تکنیک های مخصوص حرکات tipping تاج و ریشه و در نهایت حرکت دندان بصورت bodily می باشد.
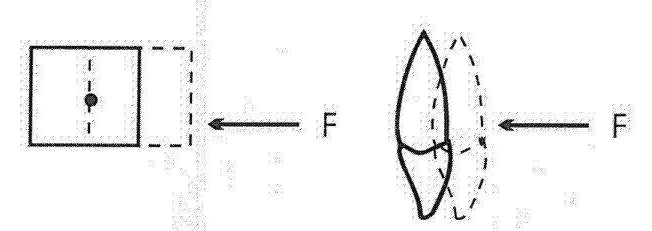
شکل 1-2 : در این شکل حرکت انتقالی مشاهده می شود.
در ارتودنسی نیروها بیشتر روی تاج دندان اعمال می شوند زیرا دندان در داخل استخوان قرار می گیرد و اطراف ان انساج نرم می پوشانند . پس قادر نیستیم نیرو را بر مرکز مقاومت جسم وارد کنیم.
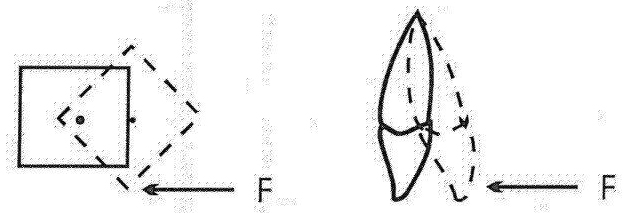
شکل 3-1 : در این شکل حرکت چرخشی انتقالی مشاهده می شود
حرکت چرخشی خالص pure rotation
اگر دو نیروی مزدوج مساوی در جهت مخالف با فاصله یکسان از مرکز مقاومت جسم اثر نماید باعث حرکت چرخشی جسم حول محور خود بدون حرکت انتقالی می گردد. این چرخش توسط دو نیرو که مقدار گشتاور moment مساوی دارند و باهم موازی و دارای فاصله مساوی از مرکز ثقل هستند ولی برخلاف جهت جهت همدیگر روی جسم اعمال می شوند به وجود می اید. به این سیستم couple می گویند. این نیرو در ارتودنسی زیاد بکار می رود.
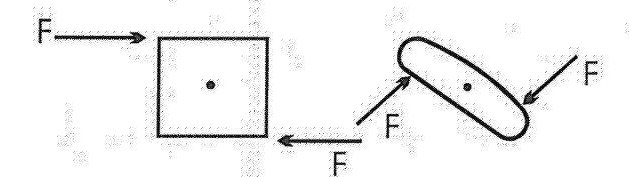
شکل 4-1 در این شکل گشتاور حرکت چرخشی خالص مشاهده می شود
گشتاور یا moment
گشتاور عبارت است از تمایل یک نیرو برای یک حرکت چرخشی انتقالی در حول یک جسم
مقدار گشتاور برابر با حاصلضرب فاصله محل اثر نیرو تا مرکز مقاومت ، در مقدار نیرو می باشد. واحد گشتاور گرم.میلیمتر یا نیوتون .میلیمتر می باشد. از لحاظ ریاضی گشتاور بصورت M=F.d بدست می آید.
12/ اصول بایومکانیک ناندا در دستگاههای ارتودنسی
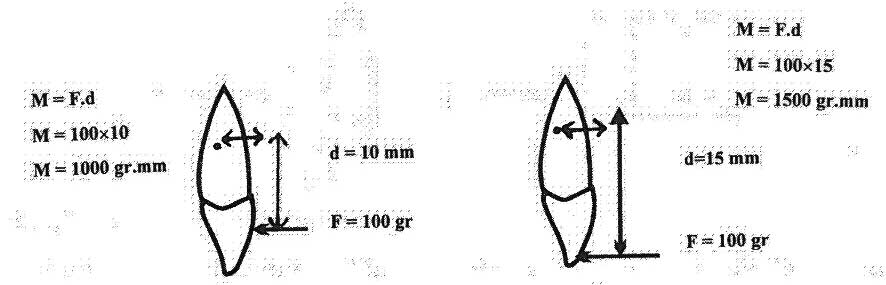
شکل 5-1 در این شکل نحوه محاسبه گشتاور مشاهده می شود
با توجه به مثالهای بالا هرچه فاصله از مرکز مقاومت بیشتر می شود نیروی کمتری برای ایجاد Tipping مورد نیاز خواهد بود.
در ارتودنسی دندان توسط نیرو حرکت می کند و نیرو برابر با حاصلضرب جرم در شتاب است F=m.a. واحدهای نیرو برابر با نیوتون یا گرم میلیمتر بر مجذور ثانیه است. چون از نظر کلینیکی منظور از شتاب m/s² نسبت به اندازه نیرو ناچیز است. در کلینیک گرم بجای نیوتون بکار می رود.
نیرو بصورت بردار است و با خصوصیات بردارها معرفی می گردد. کمیتهای بردار با داشتن مقدار نیرو (magnitude) و جهت نیرو (direction) مشخص می گردند.
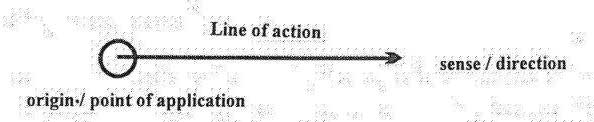
شکل 6-1 این شکل یک بردار نیرو را نشان می دهد.
مقدار نیرو توسط اندازه بردار تعیین می شود. جهت بردار با جهت اثر line of action راستا sense مبدا نیرو point of origin و محل اثر نیرو point of application مشخص می گردد. نیروهای ارتودنسی به روشهای متفاوتی اعمال می شود. این روش ها شامل کش و خم در وایر، فنر، پیچ و نیروهای عضلانی می باشند. چندین بردار نیرو در یک مسیر از طریق جمع ریاضی به یک نیرو تبدیل می شوند ( شکل 7-1) بردارها می توانند با قرار دادن مبدا در انتهای یک بردار دیگر در صورتی که خط اثر انها ( از نظر طول و جهت ) حفظ شده باشند با یکدیگر جمع می شوند.

شکل 7-1 جمع ساده بردارها در صورتیکه جهت انها یکسان باشد
در مواردی که جهت بردار نیروها مخالف یکدیگر باشند و در یک راستا قرار داشته باشند محصله نیرو از طریق جمع ریاضی بدست می اید .

شکل 8-1 جمع ساده بردارها در صورتیکه جهت انها مخالف یکدیگر باشد
در مواردی که بردار نیرو ها در یک جهت نباشند جمع ساده کمیت بردارها از لحاظ ریاضی غیرممکن است . حاصل جمع دو یا چند بردار به نام محصله نیرو یا Resultant force نامیده می شود. محصله این نیروها از طریق محاسبه مثلثاتی بدست می اید.
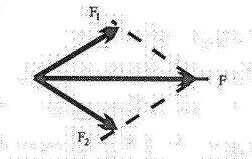
شکل 9-1 در این شکل دو بردار که از نظر راستا و جهت مختلف قرار دارند مشاهده می شود
بردارها می توانند به مولفه هایی تجزیه شوند. تقسیم نیروها به مولفه ها در سه بعد فضایی X.Y.Z امکان پذیر است ( شکل 10-1)
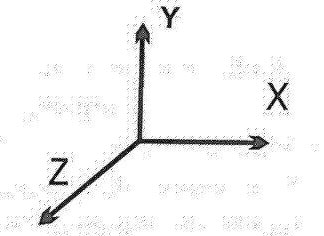
شکل 10-1 در این شکل سه مولفه XYZ مشاهده می شود.
از نظر کلینیکی تشخیص مولفه های افقی، عمودی و عرضی نیرو باعث پیش بینی بهتر مسیر حرکت دندان می گردد. برای به دست اوردن مقادیر مولفه های بردار، محاسبات مثلثاتی بکار برده می شود.
انواع نیروها
نیروی continuous
نیرویی است که بطور مداوم و پیوسته روی جسم وارد می شود وقتی مقدار نیروی مداوم برابر نیوری اصطکاک باشد. اگر جسم دارای حرکت یکنواخت باشد به حرکت یکنواخت خود با سرعت ثابت ادامه می دهد و اگر جسم ساکن باشد به حالت ساکن خود باقی می ماند. در درمانهای ارتودنسی برای ایجاد نیروی مداوم با توجه به شرایط متعدد بافتی باعث حرکت یکنواخت نمی شود. در دستگاههای ارتودنسی برای ایجاد نیروی مداوم دستگاه باید در مدت کوتاهی مرتبا فعال شود. استفاده از coil spring که بطور مرتب در فواصل زمانی مسخص می گردد، نیروی مداوم تولید می کند.
نیروی interrupted
نیروی interrupted نیرویی است که در زمان کوتاهی به صفر برسد. این نیرو اگر به جسم وارد شود و جسم متحرک دارای اصطکاک باشد سرعت جسم لتدریچ کاهش می یابد و به صفر می رسد و در مورد جسم ساکن در صورتیکه نیروی وارده کمتر از اصطکاک باشد جسم حرکت نخواهد داشت. در درمانهای ارتودنسی نیروی interrupted نیرویی است که بعد از مدت کوتاهی به صفر می رسد. استفاده از chain elastic و elastic thread مثالهایی از این نیرو می باشند.
نیروی intermittent
نیروی intermittent نیرویی است که به فواصل زمانی متفاوت بر روی جسم اعمال می شود. اگر جسم دارای اصطکاک در حال حرکت باشد با توجه به میزان نیرو می تواند در جهت نگهداری سرعت اولیه یا افزایش سرعت جسم موثر باشد و اگر جسم ساکن باشد و نیرو کمتر از میزان اصطکاک باشد جسم حرکت نمی کند و اگر بیشتر از میزان اصطکاک باشد جسم حرکت شتابدار خواهد داشت. در درمانهای ارتودنسی با توجه به شرایط متفاوت دندانها در مقایسه اجسام عادی این حرکت از پبچیدگی خاصی برخوردار است . استفاده از دستگاههای متحرک به عنوان نیروی intermittent محسوب می شود.
سیستم نیروها
اثر نیروها در درمان ارتودنسی براساس مقدار محل اثر ، مبدا نیرو و الگی رشدی بیمار متفاوت است سیستم نیروها در ارتودنسی به دستجات زیر تقسیم می شوند.
CII mechanic این نیرو عبارت است از نیرویی که محل اثر و مبدا نیرو در یک فک می باشد به این نوع نیرو intramaxillary یا درون فکی می گویند . در این سیستم مبدا از یک یا نعدادی از دندنهای یک فک می باشند که به منظور جابجایی یک یا چند دندان دیگر در همان فک بکار می رود .
یک مثال برای این نیرو حرکت دندان کانین بطرف دیستال ب اساتفاده از دندانهای خلفی بعنوان تکیه گاه می باشد . این نیرو می تواند توسط کش فنر سیم مگنت یا پیچ ارتودنسی ایجاد شود . مولفه های این نیرو باید مورد توجه قرار گیرد تا از ایجاد عومال جانبی جلوگیری ش.د . به علت اینکه نیروی افقی cII مکانیک نسبت به مرکز مقاومت دندان دور است به دو مولفه تقسیم می شود . این دو مولفه در جهت افقی و عمودی است . .قتی بر روی دندان مولر نیروی مزیالی وارد می شود مولفه افقی باعث حرکت دندان بسوی لینگوال می شود . چون نیروی افقی از مرکز مقاومت نمی گذرد بعث ایجاد گشتاور می شود که این گشتاور باعث ایجاد چرخش مزیال دندنهای خلفی بسمت لینگوال می شود این گشتاور برابر با مقدار نیرو در فاصله تیوپ باکال تا مرکز مقاومت دندان است . در دردمانهای ارتودنسی برای جلوگیری از ایجاد عارضه خمی در وایر تعبیه می شود که toe-in نامیده می شود به شکل 11-1 مراجعه شود .
از انجایی که جهت عمودی نیرو وارده نسبت به مرکز مقاومت در موقعیت اکلوزال واقع می شود باعث ایجاد گشتاوری می گردد . این گشتاور باعث ایجاد حرکت چرخشی انتقالی یا tipping دندان در جهت مزیال می شود . برای جلوگیری از این عارضه باید بر روی دندانهای خلفی از tip back استفاده شود . به شکل 12-1 مراجعه شود .
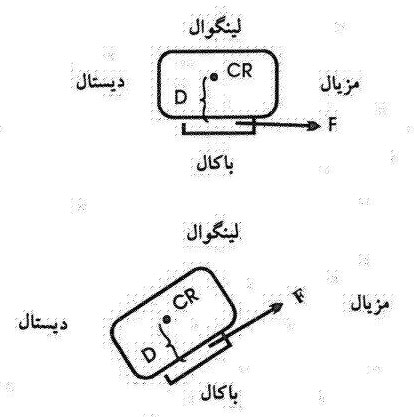
شکل 11-1 به علت نیروی CII از مرکز مقاومت دندان در جهت افقی نمی گذرد
دندان دچار چرخش انتقالی tipping می شود
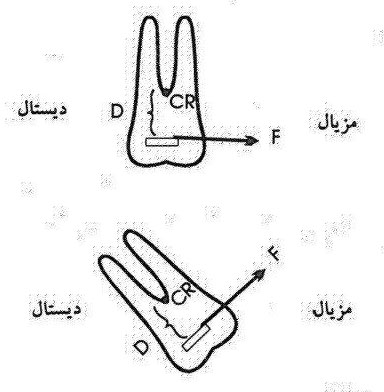
شکل 12-1 به علت نیروی CII از مرکز مقاومت دندان در جهت عمودی نمی گذرد
دندان دچار چرخش انتقالی tipping می شود
موارد فوق لذکر بری حالاتی ست که قرار است C خلفی به مزیال حرکت کنند . اگر متخصص ارتودنسی بخواهد دنادنهای قدامی را به عقب ببرد . مطالب گفته شده معکوس خواهند شد بطوریکه در جهت عرضی دندانهای قدامی تحت تاثیر نیروی CII مکانیک که از دندانهای خلفی وارد شده باشد به سمت distal in می چرخند که برای این عارضه باید در دندانهای قدامی anti rotentional bend تعبیه شود و در جهت عمودی حرکت چرخشی انتقالی در دندانهای قدامی بصورت distal tipping خواهد بود که بایستی با اضافه کردن tip forward خنثی گردد .
CIII mechanic
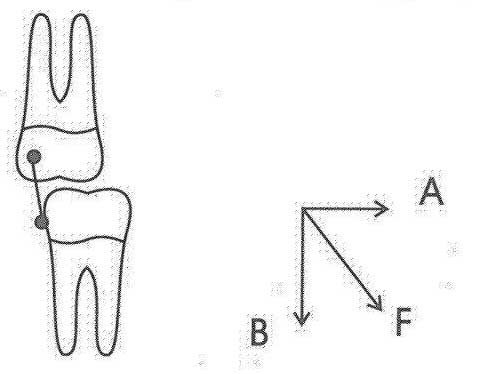
این نیرو عبارت است از نیرویی که از یک به قسمت قدام فک بالا و از طرف دیگر به قسمت خلفی فک پایین متصل می شود . به این نیرو intermaxillary force یا بین فکی می گویند . این نیرو می تواند برای حرکت قدامی فک بالا بطرف دیستال با استفاده از دندانهای خلفی فک پایین به عنوان تکیه گاه بکار برده شود . این نیرو می تواند توسط کش ، فنر ، مگنت و یا دستگاه Herbst بوجود اید . این نیرو دارای سه مولفه است که در جهت افقی ، عمودی ، عرضی عمل می نماید . مولفه افقی نیرو ی CIII مکانیک در دو جهت مورد بررسی قرار می گیرد یکی در جهت افقی و دیگری در جهت عمودی است . از نظر جهت اقی به علت اینکه نیروی افقی بر روی دندان مولر دور از مرکز مقاومت عبور می نماید باعث چرخش دندان بصورت lingual-in می شود . برای جلوگیری از این عارضه باید در وایر toe-in قرار داد و در جهت عمودی باث حرکت چرخشی انتقالی مولر در جهت مزیال mesial tipping می شود که برای جلوگیری از این عارضه باید بر روی دندان مولر tip back گذاشت . مولفه عمودی نیروی CIII مکانیک در دندان مولر به علت اینکه دور از مرکز مقاومت عبور می کند باعث حرکت دندان به طرف لینگوال می شود و در جهت تشدید عاره lingual-in مولفه افقی عمل می نماید . برای جلوگیری از این عارضه باید وایر را expand کرد . مولفه عمودی CIII مکانیک بسیار قدرتمند است . این مولفه باعث Extransion دندان می شود و چون نیرو از مرکز مقاومت نمی گدرد و از جهت باکال می گردد در نتیجه دندانی که بدین صور ت extrude می گردد لینگ.والی می شود . بنابراین عارضه جانبی این مولفه باعث حرکت دندان مولر در جهت لینگوال می شود و عارضع مولفه افقی در جهت افقی باعث می شود که دندان مولر lingual-in شود و در جهت لینگوال بچرخد ( مولفه افقی در دو جهت افقی و عمودی مورد بررسی قرار می گیرد . ) بنابراین در CIII مکانیک ، لینگوالی شدن دندان یکی از عوارض جانبی است پس برخلاف گفته برخی از محققین ضرورت دارد که وایر در فک پایین و در هنگام استفاده از CIII مکانیک بدست می اید . بطور خلاصه مولفه افقی CIII مکانیک باغث دو نوع حرکت می شود . یکی در جهت مزیودیستال که در دندانهای قدامی باعث distal tipping و در دندانهای خلفی باعث mesial tipping می شود و دیگری در جهت عرضی ست که در جهت عرضی است که باعث لیتگوالی شدن دندان مولر می گردد . به عبارت دیگز منجر به mesial-in شدن دندانهای خلفی و distal-in شدن دندانهای قدامی می گردد . مولفه عمودی باعث دو نوع حرکت می ششود یکی در جهت extrusion و دیگری در جهت lingual-in می باشد . شکل 13-1 نمای شماتیک CIII مکانیک را نشان می دهد اگرچه صرف مخصوص درمان مال اکلوژن CIII نمی باشد بلکه در موارد دیگر بر اساس نیازهای بیمار مورد استفاده قرار می گیرد .
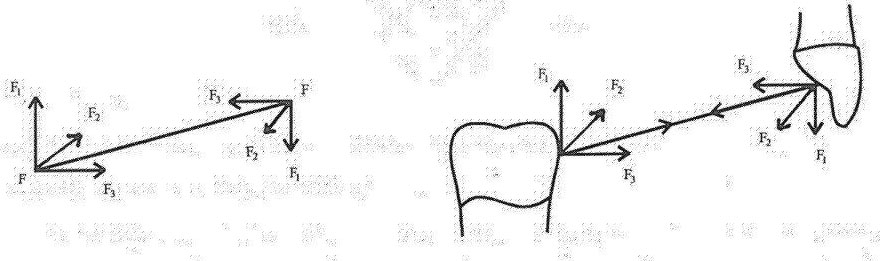
شکل 13-1 نمای شماتیک CIII مکانیک مشاهده می شود نیروی F به 3 مولفه تقسیم می شود F1 در جهت عمودی ، F3در جهت افقی و F2 در جهت عرضی می باشد
CIIII مکانیک
این نیرو عبارت است از نیرویی که از یک طرف به سمت عقب فک بالا و از طرف دیگر به قسمت جلوی فک پایین متصل می شود . با توجه به اینکه مبدا و محل اثر در CIIII مکانیک برعکس CIII مکانیک است . بنابراین تمام مطالب ذکر شده برای CIII مکانیک مانند CIIII مکانیک است ولی در جهت مخالف می باشد . شکل 14-1 نمای شماتیک CIIII مکانیک را نشان می دهد .
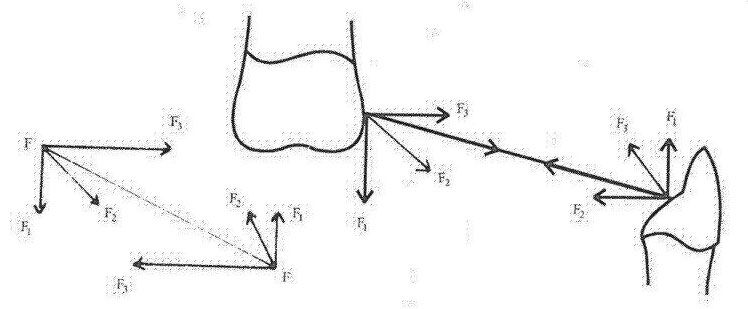
شکل 14-1 در این شکل نمای شمایک CIIII مکانیک مشاهده می شود نیروی F به 3 مولفه تقسیم می شود . F1 در جهت عمودی ، F3 در جهت افقی و F2 در جهت عرضی می باشد .
CIIIII مکانیک
این نیرو بصورت عمودی از یک فک به فک دیگر منتقل می شود و می تواند در ناحیه قدامی و خلفی بکار برده می شود معمولا CIIIII مکانیک از تیوپ باکال مولر اول فک بالا به تیوب باکال مولر اول فک پایین متصل می شود . این نیرو می تواند توسط کش ، فنر و مگنت ایجاد گردد . مولفه های این نیرو باید مورد توجه قرر گیرد تا از ایجاد عوارض جانبی جلوگیری شود . این نیرو دارای دو مولفه است که در جهت عمودی و عرضی ار می نماید . در شکل 14-1 نمای شماتیک CIIIII مکانیک مشاهده می شود . اتصال الاستیک در ناحیه مزیوباکال ، دیستوباکال و یا کل ناحیه باکال می تواند باعث ایجاد انواع متفاوتی از حرکات
جانبی گردد . به فرض اینکه اتصال الاستیک بطور عمودی از ناحیه باکال یا به عبارت دیگر در امتداد مرکز مقاومت هردو دندان عبور نماید دو مولفه عمودی و عرضی ایجاد می شود .
CIIIII مکانیک دارای مولفه عمودی است که باعث extrusion دندان می شود . چون نیرو از مرکز مقاومت دندان نمی گذرد . در نتیجه دندانی که بدین صورت extrude می شود به سمت لینگوال می چرخد در شکل 15-1 نمای شماتیک CIIIII مکانیک مشاهده می شود .
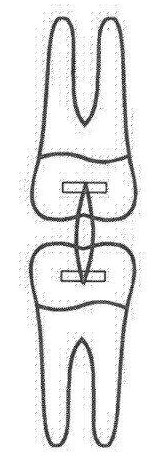
شکل 15-1 در این شکل مولفه عمودی CIIIII مکانیک مشاهده می شود .
شکل 16-1 در این شکل نمای شماتیک CIIIII مکانیک مشاهده می شود . نیروی F به 2 مولفه تقسیم می شود . F1 در جهت عرضی و F2 در جهت عمودی می باشد .
مولفه دیگر CIIIII مکانیک مولفه عرضی است در صورتی که کش از تیوپ باکال مولر اول بالا و پایین بهم متصل می شوند ، مولفه عرضی باعث حرکت دندان به سمت لینگوال می گردد . همانطور که در شکل 15-1 مشاهده می شود نیروی CIIIII مکانیک به F نشان داده شده است که یه دو مولفه عمودی F2 و عرضی F1 تجزیه می گردد مولفه عرضی CIIIII مکانیک باعث لینگوالی شدن تاج می شود و مولفه عمودی باعث extrusion دندان می شود . دندانی که extrude می شود لینگوالی نیز می گردد بنابراین حرکت لینگوالی در CIIIII مکانیک بسیار زیاد است .
در صورتیکه CIIIII مکانیک از لینگوال یک فک به لینگوال فک دیگر وصل شود . مولفه عرضی عکس حالت فوق می باشد .
در صورتیکه CIIIII مکانیک از سطح لینگوال دندان در یک فک به سطح باکال دندان در فک دیگر، وصل شود ( اصطلاحا کراس مکانیک گفته می شود ) مولفه های عرضی در فک بالا و پایین در خلاف جهت همدیگر خواهد بود مولفه های عمودی باعث extrusion دندان می گردد .
در شکل 17-1 نمای شماتیک کراس الاستیک مشاهده می شود در تصویر A 17-1 مولر فک بالا نه تنها extrude می گردد بلکه باکالی هم می شود . علت باکالی شدن مولر به دو دلیل است یکی اینکه چون نیرو از مرکز مقاومت نمی گذرد و از سمت لینگوال دندان می گذرد ، هنگامی که سمت لینگوال مولر extrude شود . مولر باکالی می گردد . دلیل دیگر این است که مولفه عرضی باعث باکالی شدن مولر فک بالا می گردد .
مولر پایین در شکل A 17-1 به دو دلیل لینگوالی می شود . اولا نیروی extrusion چون از ناحیه باکال وارد می شود و دور از مرکز مقاومت است دندان لینگوالی می شود . مولفه عرضی این نیرو هم باعث لینگوال شدن تاج مولر پایین می گردد . تمام مطلب ذکر شده در مورد شکل B 17-1 در جهت مخالف صادق است . با توجه به سیستم نیروهای گفته شده تنوع بسیار زیادی وجود
دارد که بر اساس نوع مال اکلوژن ، اهداف مورد نطر ، میزان تکیه گاه ، شرایط پریودنتال می توان از چند نوع سیستم همزمان استفاده کرد به CIIIII مکانیک اصطلاحا vertical mechanic نیز گفته می شود .
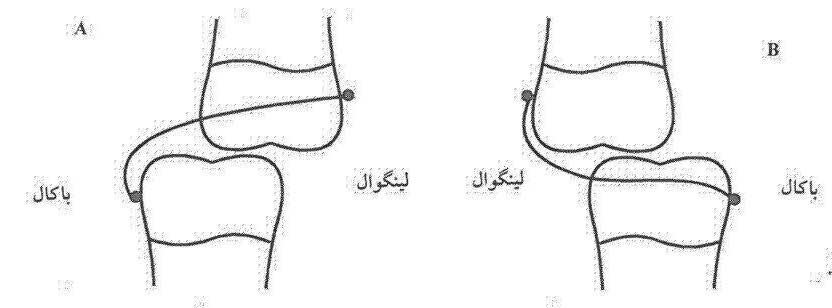
شکل 17-1 در ین شکل نمای شماتیک کراس الاستیک مشاهده می شود
تکیه گاه یا Anchorage
بعد از تعاریف مختصر در مورد نیروهای ارتودنسی لازم است در مورد نکیه گاه صحبت بعمل اید . این اصطلاح در ارتودنسی به معنی خنثی کردن عکس العمل نیروها می باشد . هر دستگاه ارتودنسی داری یک قسمت فعال است که عمل ایجاد می کند. این عمل دارای عکس العمل می باشد که در مقابل این عکس العمل باید مقاومت کافی وجود داشته باشد تا حرکات ارتودنسی نامطلوب بوجود نیاید .
درمان ارتودنسی زمانی موفقیت امیز می باشد که قسمت فعال بتواند هدفهای درمان را ایجاد نماید بدون اینکه عکس العمل نامطلوب روی قسمت های دیگر دندانی فکی بگذارد .
Ancharge برحسب موقعیت ، وضعیت و روش استفاده به دو مجموعه بزرگ تقسیم می شود :
Intra oral anchorage یا تکیه گاه داخل دهانی
در این نوع تکیه گاه از دندانها و بافت اطراف انها به عنوان تکیه گاه استفاده می شود . این نوع تکیه گاه به دو دسته تقسیم می شود :
الف ) intra maxillary anchorage یا تکیه گاه تک فکی یا درون فکی
در این نوع تکیه گاه از یک یا مجموعه ای از دندانها و انساج نگهدارنده یک فک برای به حرکت دراوردن یک یا مجموعه ای از دندانهای همان فک استفاده می شود و در چند حالت دیده می شود .
Simple anchorageیا تکیه گاه ساده
در صورتیکه بر اثر عکس العمل نیروهای ارتودنسی ، این نوع تکیه گاه جابجا شود . جابجایی آن به صورت tipping خواهد بود . این نوع تکیه گاه می تواند بصورت های زیر باشد .
A-1 : single anchorage یا تکیه گاه یک دندانی
این نوع تکیه گاه شامل یک دندان برای جابجایی یک یا مجموعه ای از دندانها در نظر گرفته می شود . این نوع تکیه گاه
بندرت در درمانهای ارتودنسی به کار می رود معمولا در ارتودنسی تکیه گاه به صورت مجموعه ای یا گروهی در نظر گرفته می شود .
A-2: Multiple anchorage یا تکیه گاه چند دندانی
این نوع تکیه گاه شامل مجموعه ای از دندانها می باشد که برای جابجایی یک یا تعدادی از دندانها استفاده می شود .
A-3: reinforced anchorage یا تکیه گاه تقویت شده
این نوع تکیه گاه توسط انواع دیگر تکیه گاه ها تقویت می شود . تقویت یک تکیه گاه می تواند بصورت داخل دهانی یا خارج دهانی انجام گیرد .
A-4 : reciprocal anchorage یا تکیه گاه دوطرفه
این نوع تکیه گاه مطلوب ترین نوع می باشد . بطوریکه در استفاده از این تکیه گاه هم دندانهای مورد نظر و هم تکیه گاه باید جابجا شوند تا هدف درمان تامین گردد . معمولا در تکیه گاههای intra maxillary نیروهای ارتودنسی ، در طبقه C II mechanic قرار می گیرند . به عنوان مثال زمانی که دیاستمی بین سانترال ها وجود دارد برای حرکت دندان سانترال راست به سمت مزیال ، دندان سانترال چپ باید به عنوان تکیه گاه عمل نماید و بر عکس برای حرکت دندان سانترال چپ به سمت مزیال دندان دندان سانترال راست باید بعنوان تکیه گاه باشد . به عبارت دیگر هردو دندان هم ، به عنوان تکیه گاه می باشند و هم به عنوان دندانی که باید جابجا شوند .
Staitionary anchorage یا تکیه گاه ایستگاهی
در صورتی که براثر عکسالعمل نیروهای ارتودنسی این نوع تکیه گاه جابجا شود . جابجیی ان بورت انتقالی یا bodily خواهد بود این نوع تکیه گاه مانند تکیه گاه ساده به صورتهای single , multiple , reinforced و یا reciprocal می تواند تقسیم گردد . از نظر عملی تکیه گاه مطلق وجود ندارد زیرا در سیستم بیولوژیکی هرقدر نیروها ضعیف تر باشند باز هم مقداری جابجایی و تغییرات بافتی و استخوانی وجود دارد .
ب- intermaxillary anchorage یا تکیه گاه بین فکی
در این نوع تکیه گگاه دندانهای یک فک برای جابجایی و یا تقویت تکیه گاه دندانهای فک دیگر بکار میروند . این نوع تکیه گاه در موارد زیر دیده می شود .
زمانی مورد استفاده قرار می گیرد که CI II mechanic برای کاهش overjet و یا به حرکت دراوردن دندانهای خلفی فک پایین جهت بستم فضاای بوجود امده بر اثر از دست دادن و یا extraction دندانها بکار گرفته شود .
زمانی که C I III mechanic برای درمان موقعیت دندانهای قدامی پایین و یا به حرکت دراوردن دندانهای خلفی بالا بطرف جلو بکار رود .
زمانی که crass mechanic برای اصلاح و درمان کراس بایتهای خلفی بکار برده شود .
زمانی که vertical mechanic برای افزایش ارتفاع صورت بکار میرود .
در هریک از انواع فوق تکیه گاه می توانند بصورت single , multiple , reciprocal و یا reinforced باشد .
Extra oral anchorage یا تکیه گاههای خارج دهانی
هدگیر head gear
سر یا پشت گردن بعنوان تکیه گاه برای درمان جلوامدگی فک بالا مورد استفاده قرار می گیرد . نیروی کششی از طرف بازوی خارجی یا outer bow به بازوی داخلی یا inner bow منتقل گشته و از طریق بازوی داخلی به دندانها و از طریق دندانها به مجموعه دندانی فکی انتقال می یابد . برحسب اینکه نیرو نسبت به مرکز نقاومت دندان از چه فاصله ای عبور می کند . چندین حالت وجود دارد .
A1 : High pull head gear
در اینجا تکیه گاه از قسمت های فوقنی جمجمه ای تامین می شود . لذا جهت کشش نیرو از بالای مرکز مقاومت دندانهای موثر عبور می نماید . در نتیج مولفه های این نیرو بصورت نیروهای دیستالی و نیروهای intrude کننده خواهد بود این نوع هدگیر بیشتر در ناهنجاری های open bite بکار می رود . زیرا دارای نیروهای intrude کننده می باشد و باعث کم شدن ارتفاع صورت در ناحیه خلفی می گردد .
A2 : straight pull headgear
در این نوع هدگیر ، نیروهای ایجاد شده از مرکز مقاومت دندانهای مولر فک بالا و یا از مرکز مقاومت ماگزیلا عبور می نماید و دندانها و یا ماگزیلا را بصورت bodily حرکت خواهد داد . طبیعتا گشتاوری برای این نیرو وجود ندارد . باید دانست در صورتیکه دندانهای مولر بطرف عقب حرکت نمایند . ارتفاع عمودی قسمت خلفی حفره دهان زیاد می گردد که این امر ، منجر به باز شدن بایت بیمار می گرد ولی وجود high cup مانع از باز شدن بایت می گردد.
A3 : low pull head gear
در این نوع هدگیر ، تکیه گاه از پشت گردن بیمار تامین می شود لذا جهت کشش نیروها در این دستگاه از زیر مرکز مقاومت دندانهای مولر عبور می نماید در نتیجه مولفه این نیرو بصورت نیروهای دیستالی و نیروهای extrusion خواهد بود . در این نوع هدگیر در موارد موجود overjet و ناهنجاری های deep bite مطلوب می باشد .
تمام موارد ذکر شده تقریبی هستند و نمی توان انها را بطور مطلق بکار برد . بنابراین بر اساس شرایط بیمار و نوع ناهنجاری تصمیم گرفته می شود که از کدام ن.ع هدگیر استفاده شود .
B : chin cup
در این نوع تکیه گاه از قسمتهای بالای جمجمه استفاده می شود و نیروهای کششی توسط دستگاه های ساخته شده به فک پایین منتقل می گردد . در این نوع دستگاه می تواند در تغییر جهت رشد فک پایین موثر باشد لذا در درمان بیماران CI III بر اساس شرایط مال اکلوژن و سن بیمار بکار برده شود .
C : Reverse chin cup
در این نوع تکیه گاه از قسمت های بالای جمجمه استفاده می شود و نیروهای کششی توسط دستگاههای ساخته شده به فک پایین منتقل می گردد این نوع دستگاه می تواند در تغییر جهت رشد فک پایین و تسریع رشد فک بالا موثر باشد این دستگاه در بیمارانی که دارای Maxillary deficiency هستند کاربرد دارد لذا در مان بیماران CI III بر اساس شرایط مال اکلوژن و سن بیمار بکار برده می شود در شکل 17-1 نمای شماتیک Reverse chin cup مشاهده می شود .
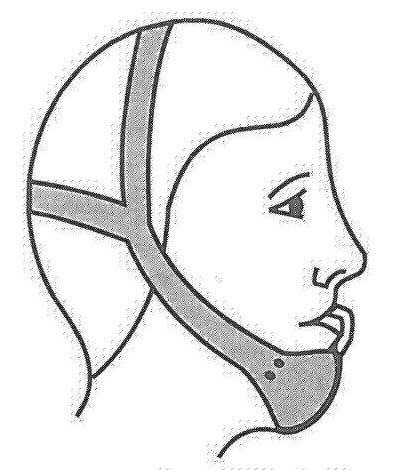
D : Face mask
در این نوع تکیه گاه در ناحیه چانه و پیشانی بیمار تامین می ود و نیروهای کششی باعث تسریع رشد فک بالا می گردد . این دستگاه در درمان بیماران CI III بر اساس شرایط مال کلوژن و سن بیمار بکار برده می شود . این دستگاه در بیمارانی که دارای Maxillary deficiency هستند کاربرد دارد عدم همکاری بیمار بدلیل ظاهر بزرگ دستگاه از
مشکلات مهم بخصوص دربیمارانی که از عینک استفاده ی کنند است . در شکل 19-1 نمای شماتیک face mask مشاهده می شود .
شکل 18-1 در این بیمار reverse chin cup مشاهده می شود
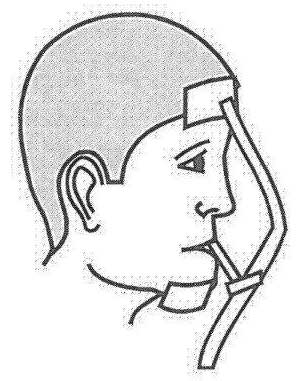
شکل 19-1 در این بیمار face mask مشاهده می شود.
پیشنهاد می کنیم برای محاسبه هزینه ارتودنسی از ویزیت رایگان دکتر جمیلیان بهره مند شوید.
دانلود فصل اول (اصول مکانیک) از کتاب اصول بیومکانیک ناندا در دستگاههای ارتودنسی




چقدر خوب همه چیز را توضیح دادین بسیار عالی .
سلام و درود بر حسن توجه شما.