فصل 4
مفاهیم فیزیکی که پایه مکانیکهای ارتودنسی را فرم می دهند، کلید فهم نحوه ی عملکرد دستگاه های ارتودنسی بوده و در طراحی دستگاه ها و متدولوژی درمانهای ارتودنسی اهمیت حیاتی دارند. این مفاهیم فیزیکی تنها مختص به ارتودنسی نیستند بلکه قواعد ابتدایی علم مکانیک را شکل می دهند. ما در این فصل طرح کلی از قوانین و مفاهیم بنیادی که حرکت ارتودنتیک دندان را هدایت می کنند، ارائه می نماییم. تمام دستگاه هایی که تا به امروز گزارش شده اند و در آینده نیز به وجود خواهند آمد از این اصول مکانیک استفاده خواهند نمود. با این وجود بیایید از ابتدا، شروع کنیم: کلمه ی “مکانیک” به چه معناست؟
مکانیک را می توان شاخه ای از علم فیزیک دانست که با جنبه های مکانیکی هر نوع سیستمی سر و کار دارد. این شاخه به دو دسته تقسیم می شود: استاتیک ، که مطالعه عوامل مرتبط با سیستم های غیر متحرک (rigid) است، و دینامیک، که مطالعه عوامل مرتبط با سیستم های در حال حرکت (هم چون یک ماشین یا هواپیمای در حال حرکت) است.
روشهای مطالعه ی حرکت دندان
دو روش در مطالعه ی جنبه های بیولوژیک و مکانیکی حرکت دندان مورد استفاده قرار می گیرند: روش کمّی و روش کیفی. روش کمّی شامل توصیف حرکت دندانها یا ساختارهای اسکلتی همراه با آنها با مقیاس عددی است. همه ی ما با واژه هایی از جمله 3 میلیمتر کانین رترکشن یا 15 درجه flaring ثنایا آشنا هستیم. اما توصیف حرکت دندانی به تنهایی با استفاده از روش کمّی، ماهیت کامل حرکت را توضیح نمی دهد، و فهم نوع یا ماهیت حرکت دندانی که رخ داده نیز از اهمیت برخوردار است. یک روش کیفی حرکت را با واژه های غیر عددی توصیف می کند (به این معنی که هیچ بخشی از حرکت را اندازه نگرفته و یا نمی شمارد). این روش اغلب در سطح بالینی دنبال شده و هم چون tipping و translation از روی عکس های رادیوگرافی و یا مدل های گچی استنتاج می شود.
هر دو روش آنالیز کمّی و کیفی اطلاعات ارزشمندی راجع به کارایی حرکت فراهم می سازند. با این وجود، ارزشیابی کیفی روش غالب مورد استفاده ارتودنتیست ها در آنالیز حرکت دندانی است. اطلاعات به دست آمده با آنالیز کیفی می توانند با داده های کمّی تحقق بیابند و فرضیه های متعددی برای پروژه های تحقیقی با چنین روشی ایجاد می گردند.
مفاهیم مکانیکی پایه
سیستم و frame of reference
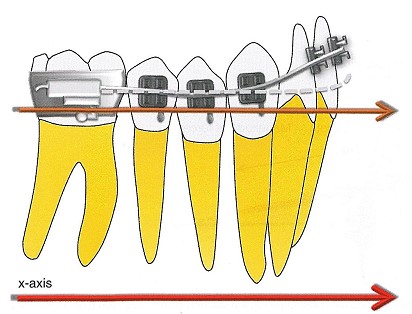
مفاهیم مرتبط با حرکت دندانها تا حد زیادی بر تعدادی از اصول پایه ی مکانیک فیزیکی تکیه دارد که با آنالیز عملکرد نیرو بر جسم سر و کار دارد. گام اول در ارزیابی هر نوع حرکت، شناسایی سیستم است. یک سیستم ، یک جسم یا گروهی از اجسام یا اشیاء هستند که حرکت آنها مورد ارزیابی قرار می گیرد؛ حال می تواند یک توپ، یک ماشین و یا یک دندان باشد. ما هم چنین نیازمند شناسایی یک frame of reference هستیم که حرکت سیستم در محدوده ی آن، رخ می دهد. این frame of reference میت واند یک محیط ثابت باشد یا چیزی باشد که خودش هم در حال حرکت است. استفاده از یک frame of reference ثابت، کمترین پیچیدگی را به همراه دارد. برای مثال حرکت دندانها را می توان در ارتباط با ساختارهای با ثبات استخوانی سر و صورت ارزیابی نمود که به طور شایعی در سوپرایمپوزیشن های سفالومتریک به کار می روند. از طرف دیگر می توان از frame of reference های درحال حرکت نیز استفاده نمود. مثال آن می تواند اینتروژن دندان های ثنایا باشد (تصویر 1-4). در این جا باید توجه زیادی در انتخاب frame reference جهت اندازه گیری اینتروژن مبذول داشت. شما باید بدانید که می خواهید حرکت دندانها را در مقایسه با یکدیگر، یا در مقایسه با ساختار دیگری در مجموعه فک و صورت، یا حتی در مقایسه با یک reference frame خارجی در بیرون از این مجموعه، اندازه بگیرید.
تصویر 1-4 می توان میزان اینتروژن دندان های ثنایا را به دو روش محاسبه نمود. روش 1: frame of reference انتخابی، دندان های خلفی هستند و با خط نارنجی نمایش داده می شوند. دندان های خلفی حین اینتروژن دندان های ثنایا، ثابت باقی نمانده و تا حدی حرکت می کنند (یعنی، خود frame of reference هم جابه جا می شود). به این ترتیب، هر اندازه گیری که بر روی دندان ثنایا صورت می گیرد، به جای اعلام میزان “مطلق” حرکت دندان های ثنایا، اطلاعاتی را در رابطه با حرکت آنها نسبت به دندان های خلفی، فراهم می کند. روش 2: انتخاب یک frame of reference در خارج از سیستم که با خط قرمز نشان داده شده است. این frame of reference داخل سیستم نبوده و به این ترتیب تحت تاثیر هیچ حرکت دندانی نیز نیست.
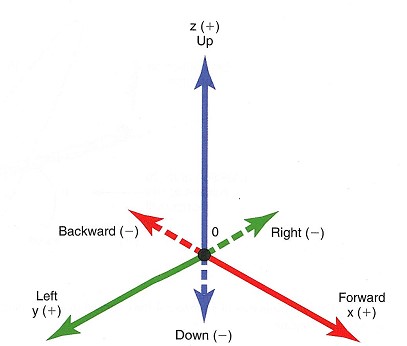
تصویر 2-4 سه محور فضایی مورد استفاده در تعیین محل هر نوع سیستم در سه بعد.
برقراری یک frame of reference
ساده ترین و قابل درک ترین راه تعیین جهت حرکت دندان، ایجاد پلان ها و یا محورهای اندازه گیری بر حسب رابطه دندانها نسبت به زمین است. به این ترتیب، محورها و پلان های اندازه گیری در فضا تعریف می شوند. هر پلان یا محور موازی با زمین، پلان یا محور افقی است. هر پلان یا محور عمود بر زمین، پلان یا محور عموی است. دو محوری که بر یکدیگر عمودند اما با زمین موازی هستند، محور های X و Y نام دارند. جهت forward به صورت مثبت (+) و جهت backward به صورت منفی (-) در نظر گرفته می شود. جهت محور y، در چپ و راست جسم مورد اندازه گیری قرار دارد. جهت چپ، مثبت و جهت راست، منفی در نظر گرفته می شود. محور سوم که عمود بر دو محور قبلی است عمودی بوده و محور z نام دارد. جهت upward مثبت و جهت downward منفی است. این سه محور (x، y، و z) برای توصیف محل یک دندان و یا سیستم مورد ارزیابی در فضا و تعیین جهت حرکت به کار می روند. این محورهای فضایی با تغییر جهت گیری جسم در فضا تغییر نمی کنند بلکه در ارتباط با زمین و مشاهده کننده به طور ثابت قرار دارند (تصویر 2-4).
نیرو
نقش نیرو در زندگی روزمره، آشنا است. در واقع تلاش برای تعریف مفهومی به وضوح نیرو غیر ضروری و زائد به نظر می رسد. نیرو به زبان ساده میزان pull یا push اعمال شده بر روی یک شیئ است. با این وجود از نقطه نظر ما، چنین تعریف ساده انگارانه ای کافی نیست. مطالعه مکانیک های حرکت دندانی نیازمند یک تعریف دقیق از نیرواست. پس نیرو چیست؟ نیرو چیزی است که باعث ایجاد و یا تمایل به ایجاد یک تغییر در حرکت یا شکل یک جسم یا شیئ می گردد. به بیان دیگر، نیرو باعث افزایش یا کاهش شتاب یک جسم می شود. واحد نیرو نیوتون (N) است اما در ارتودنسی تقریباً همیشه با گرم (g) اندازه گرفته می شود.
1 N = 101.9 g (≈ 102 g)
نیرو دارای چهار خصوصیت منحصر به فرد است که در تصویر 3-4 به صورت یک نیرو زاویه دار به دندان ثنایای سانترال نشان داده شده است:
- بزرگی: “میزان” نیروی اعمال شده است (مثلاً 1 N، 2 N، 5 N).
- جهت: مسیری که نیرو اعمال می گردد یا جهت گیری نیرو نسبت به جسم (مثلاً، forward، upward، backward).
- نقطه اعمال نیرو: محلی که نیرو بر جسم و یا سیستم دریافت کننده آن اعمال می شود (مثلاً در مرکز، در پایین، در بالا).
- امتداد نیرو (line of action): خط مستقیمی است که در همان پلان و در ادامه جهت نیرو از نقطه اعمال نیرو کشیده می شود.
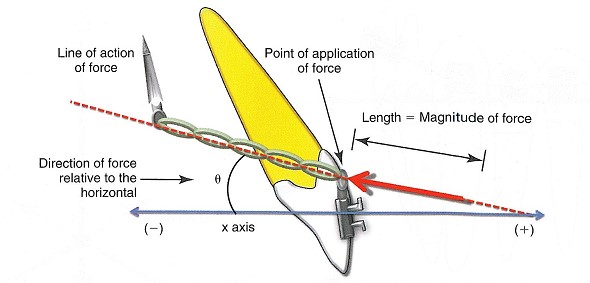
تصویر 3-4 چهار ویژگی یک نیروی خارجی اعمال شده به دندان توسط یک chain الاستیک نشان داده شده است که نیروی رترکشن (دیستاله کننده) را از مینی ایمپلنت بر روی ثنایای ماگزیلا وارد می کند.
نمودارها و بردارهای نیرو
از دید ریاضی، خصوصیات فیزیکی (از جمله فاصله ، وزن، دما و نیرو) یا به صورت اسکالر یا به صورت برداری بررسی می شوند. اسکالرها (شامل دما و وزن)، فاقد جهت بوده و کاملاً تنها با بزرگی خود توصیف می شوند. در حالیکه برداری ها هم دارای بزرگی، وهم دارای جهت هستند. نیرو نیز می تواند توسط بردار نشان داده شود.
برای ایجاد حرکت قابل پیش بینی دندان، نیرو باید به میزان بهینه، در جهت مطلوب و نقطه صحیح به دندان اعمال شود. تغییر هریک از چهار خصوصیت فوق کیفیت جابه جایی دندان را تحت تاثیر قرار می دهد. یک نیرو با یک فلش روی کاغذ نمایش داده می شود. می توان هر یک از چهار ویژگی نیرو را روی فلش نشان داد؛ مثلاً طول فلش در نسبت با بزرگی نیرو (برای مثال 1-cm = 1 N یا 2-cm = 2 N) کشیده می شود (تصویر4-4). فلش در جهت اعمال نیرو کشیده شده و دم آن (tail) در نقطه اعمال نیرو قرار دارد. Line of action نیرو را می توان به طور ذهنی در دو طرف فلش (انتهای سر و دم) امتداد داد اما طول فلش واقعی باید در نسبت تعیین شده کشیده شود. تصویر 3-4 یک نیروی یک نیوتونی را نشان می دهد که با زاویه 30 درجه به دندان ثنایای سانترال اعمال شده است.
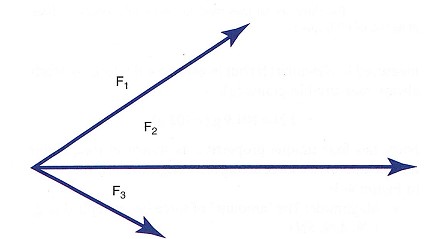
تصویر 4-4 طول بردار نیرو نشان دهنده ی بزرگی آن است. مثال: F1 = 2 N، F2 = 3 N، F3 = 1 N .
اصل transmissibility یا انتقال پذیری
اصل انتقال پذیری در مکانیک بردارها و خصوصاً در فهم تعادل و سیستم های نیروهای معادل (همان گونه که جلوتر خواهیم دید) از اهمیت بالایی برخوردار است. این اصل بیان می کند که چنان چه line of action نیروی وارده بر یک جسم rigid، یکسان باقی بماند، صرفه نظر از نقطه اعمال نیرو، پاسخ یکسانی در جسم مشاهده می گردد.
اثر دو نیرو (یا بیشتر) بر یک سیستم: جمع برداری
اغلب بیشتر از یک نیرو بر دندانها وارد می گردد. اثر خالص نیرو یا اثر تجمعی نیروهای وارده بر یک سیستم یا مجموعه ای از دندانها را می توان با ترکیب تمام بردارهای نیرو به دست آورد. پروسه ترکیب تمام نیروها تحت یک قانون هندسی به نام جمع برداری یا ترکیب برداری صورت می پذیرد. ما با حفظ جهت و بزرگی بردارها آنها را به ترتیب از سر تا دم قرار می دهیم و برادر برآیند را از دم اولین بردار تا سر آخرین بردار می کشیم. می توان جمع برداری را به طور گرافیک از کشیدن نمودارهای هم اندازه و یا به روش مثلثات نیز انجام داد.
تصویر 5-4 نشان می دهد که چگونه دو نیرو به صورت دو ضلع یک متوازی الاضلاع کشیده می شوند، و سپس متوازی الاضلاع با کشیدن دو ضلع مقابل تکمیل می شود. برآیند نیروها، یا R، قطری است که از گوشه متوازی الاضلاع (که از دمهای بردارهای نیرو تشکیل شده) کشیده می شود.
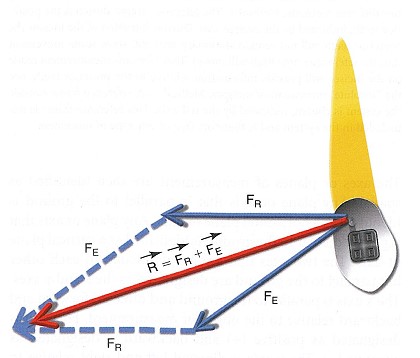
تصویر 5-4 قانون جمع برداری به روش parallelogram. می توان FR را یک نیروی رترکتیو بر روی دندان ثنایا و FE را به صورت نیرویی از یک الاستیک کلاس II در نظر گرفت. اثر خالص دو نیرو با بردار برآیند R نشان داده شده است.
اثرات جهت نیرو: تجزیه برداری
اغلب شرایطی ایجاد می گردد که باید حرکت یک سیستم یا نیروی منفرد وارد بر یک سیستم را به اجزای سازنده اش تفکیک نمود. در چنین مواردی یک بردار منفرد به دو جزء تقسیم می گردد: یک مولفه افقی و یک مولفه ی عمودی. جهات این مولفه ها در ارتباط با برخی از reference frame ها هم چون پلان اکلوزال و پلان افقی فرانکفورت تعیین می شود. مولفه های افقی و عمودی معمولاً بر یکدیگر عمودند. این پروسه برعکس روند جمع برداری است، به آن تجزیه برداری می گویند و روش مورد استفاده جهت تعیین دو مولفه برداری است که بردار برآیند را تشکیل می دهند.
برای مثال یک مینی ایمپلنت در تصویر 6-4 نشان داده شده است. A برای رترکشن دندانهای قدامی مورد استفاده قرار گرفته است. برای تعیین بزرگی نیروی وارده در هر یک از جهات موازی و عمود بر پلان اکلوزال، می توان این نیرو را به اجزای خود در این جهات تقسیم نمود. تجزیه برداری شامل سه گام است ( تصویر 6-4 ، B و C را ببینید): (1) بردار اولیه را به طول مناسب بکشید، (2) خطوط نماینده ی جهات مطلوب دو مولفه ی عمود بر هم را از دم بردار رسم کنید؛ (3) خطوط موازی با دو خط ترسیم شده در مرحله قبل را به نحوی بکشید که یک مربع مستطیل شکل بگیرد. این خطوط موازی دارای همان بزرگی و جهت خطوط متقابل خود در سمت مقابل مربع مستطیل هستند. دانستن این نکته که قواعد ساده مثلثات نیز قادر به تعیین بزرگی این مولفه ها هستند، از اهمیت برخوردار است. سینوس و کسینوس خصوصاً در یافتن مولفه های افقی و عمودی بردار نیرو بسیار مفید هستند. در این مورد، اگر برای مثال مولفه ی افقی بزرگی نیرو (FH) زاویه ی (θ) را با نیرو (F) بسازد، می توان به صورت زیر، مولفه ها را با استفاده از سینوس و کسینوس به دست آورد:
مولفه ی افقی:
FH: FH/F = cosθ; FH = Fcosθ
مولفه ی عمودی:
FV: FV/F = sinθ; FV = Fsinθ
با کمی تمرین، می توان با حذف مرحله ی نسبت گذاری، به آسانی مستقیماً مولفه ها را به دست آورد. سینوس و کسینوس θ کسرهایی برای محاسبه ی دو سمت زاویه قائمه مثلث قائم الزاویه ای هستند که اندازه ی وتر آن مشخص است. دو ضلع همواره کمتر از وتر هستند و سینوس و کسینوس هم همواره کمتر از یک هستند. برای محاسبه ضلع مقابل زاویه، به راحتی وتر را در سینوس زاویه ضرب کنید. برای محاسبه ی سمت مجاور زاویه وتر را در کسینوس زاویه ضرب نمایید.
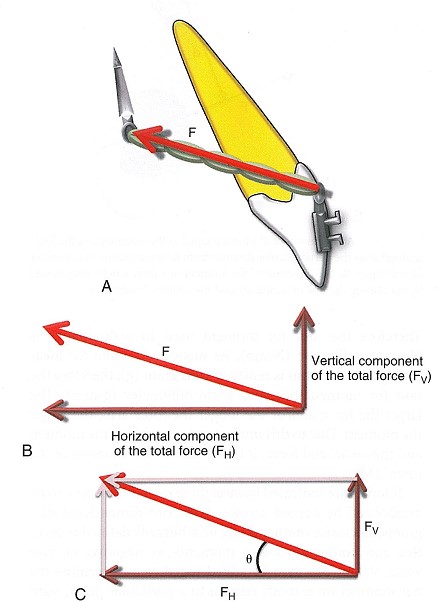
تصویر 6-4 مراحل تجزیه ی برداری. F = نیرو.
مرکز مقاومت، مرکز جاذبه، و مرکز جرم
زمانیکه نیرویی به یک جسم وارد می گردد، ماهیت حرکت آن تا حد زیادی توسط مرکز جرم آن تنظیم می گردد. مرکز جرم یک جسم نقطه ای است که تمام جرم جسم در آن متمرکز شده است ( بدین معنی که اگر نیرویی از این نقطه بگذرد، سیستم یا جسم در یک خط مستقیم حرکت خواهد کرد). در همین راستا به یاد آورید که زمین نیرویی به هر قسمت یک سیستم وارد می کند که با جرم آن قسمت نسبت مستقیم دارد. اثر کلی نیروی جاذبه روی کل یک جسم یا سیستم، مشابه زمانی است که نیروی جاذبه تنها بر یک نقطه به نام مرکز جاذبه ی جسم وارد شود. مجدداً، اگر نیرویی بر این نقطه وارد شود، منجر به حرکت مستقیم جسم بدون هیچ چرخشی می گردد. تفاوت بین مرکز جرم و مرکز جاذبه آن است که سیستم مورد بررسی در حالت دوم یک “سیستم محدود” است ( که توسط نیروی جاذبه محدود شده است).
دندانها بخشی از یک سیستم محدود هستند. در کنار جاذبه، آنها به طور غالب توسط ساختارهای پریودنتال اطراف دندان محدود شده اند که یکنواخت نیستند (شامل ریشه هستند اما تاج جزو آن ها نیست). در نتیجه دندان در صورت عبور نیرو از مرکز جاذبه یا مرکز جرم، در خط مستقیم حرکت نخواهد کرد زیرا ساختارهای احاطه کننده ی آن و ترکیب آنها، این نقطه را تغییر می دهند. برای حصول حرکت در خط مستقیم یک نقطه ی آنالوگ جدید برای مرکز جاذبه مورد نیاز است که مرکز مقاومت دندان (CRES) نام دارد (تصویر 7-4).
مرکز مقاومت را می توان از طریق رابطه اش با نیرو نیز تعریف نمود: نیرویی که با عبور line of action آن از مرکز مقاومت، قادر به ایجاد یک حرکت translation خالص باشد. برای یک دندان خاص، این حرکت می تواند در جهت مزیودیستال، وستیبولولینگوال، اینتروزیو یا اکستروزیو باشد. محل مرکز مقاومت دندان مستقیماً وابسته به “ریشه کلینیکی” دندان است. این مفهوم، حجم ریشه را در بر می گیرد که شامل استخوان پریودنتال (یعنی فاصله ی بین alveolar crest و اپکس دندان) بوده و با افزایش ضخامت ریشه (یعنی سطح آن) افزایش می یابد.1 در نتیجه محل مرکز مقاومت نیز نتیجه ی طبیعت ساختارهای پریودنتال و دانسیته ی استخوان آلوئولار و الاستیسیته ی ساختارهای دسمودنتال است که قویاً در ارتباط با سن بیمار هستند.2-4 این ملاحظات ما را وا می دارند تا به جای “مرکز مقاومت دندان”، اصطلاح “مرکز مقاومت مرتبط با دندان” (Center of resistance associated with the tooth) را به کار بگیریم.
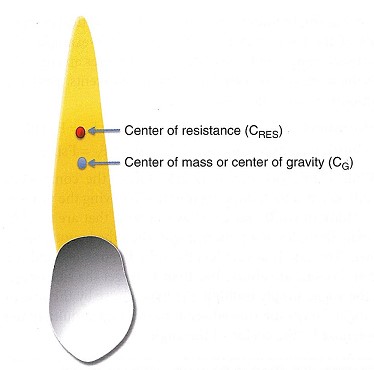
تصویر 7-4 مرکز مقاومت یا CRES دندان معمولاً اندکی اپیکال تر از مرکز جاذبه یا CG آن قرار دارد. ساختارهای پریودنتال احاطه کننده ی ریشه ی دندان منجر به مهاجرت اپیکالی CRES می گردند.
گشتاور (تورک)
زمانیکه یک نیروی خارجی به مرکز جاذبه (CG) یک جسم وارد می شود، منجر به حرکت جسم بر روی یک خط مستقیم می گردد. این نوع نیرو که Line of action آن از CG یا CRES می گذرد، نیروی سنتریک نام دارد. به این ترتیب نیروهای eccentric (نیروهای off-center) نیز خارج از CRES جسم وارد می شوند. اثر این نیروها چیست؟ نیروهای eccentric علاوه بر ایجاد حرکت در مسیر خطی، دارای یک اثر چرخشی هم هستند که تورک نام دارد؛ به بیان دیگر این نیروها یک “گشتاور” نیز روی جسم وارد می کنند. فاصله خارج محوری Line of action نیرو، بازوی نیرو ( بازوی گشتاور، بازوی اهرم، بازوی تورک) نام دارد. هر چه این فاصله بیشتر باشد، تورک ایجاد شده توسط این نیرو هم افزایش می یابد. خصوصیات بازوی نیرو بسیار مهم هستند. بازوی نیرو کوتاهترین فاصله از محور چرخش تا Line of action نیرو است. کوتاهترین فاصله همواره معادل طول خط عمود بر line of action نیرو است. (﬩(d علامت ﬩ نشان دهنده ی خط عمود است. بازوی نیرو در تعیین میزان گشتاور وارده بر سیستم اهمیت دارد.
میزان گشتاور (M) چرخاننده ی سیستم حاصل ضرب بزرگی نیرو (F) در فاصله بازوی نیرو (﬩(d است:
M = F (d﬩)
میزان F با نیوتون، و اندازه ی ﬩d با میلیمتر سنجیده می شود (تصویر 8-4، A).
در نتیجه واحد گشتاور در ارتودنسی نیوتون میلیمتر (Nmm) است. همان گونه که گفته شد نیوتون خیلی از اوقات با گرم جایگزین می شود؛ در نتیجه واحد گشتاور گرم-میلیمتر (g-mm) می گردد. هر چه میزان نیرو بیشتر یا بازوی نیرو طویلتر باشد، گشتاور نیز بزرگتر می گردد. این پدیده، به دلیل رابطه ذاتی بین گشتاور و نیروی مرتبط با آن، به عنوان “گشتاور نیرو” (moment of force or MF) نیز شناخته می شود.
اگر نیروها با خط مستقیم رسم می شوند، می توان گشتاورها را با فلش های منحنی نمایش داد. می توان گشتاورهای ساعتگرد را به طور قراردادی در نمودارهای دو بعدی، به صورت مثبت و گشتاورهای پادساعتگرد را منفی در نظر گرفت (و بالعکس). سپس می توان این مقادیر را برای تعیین گشتاور خالص وارده بر یک دندان در یک نقطه خاص (مثلاً مرکز مقاومتش)، با یکدیگر جمع زد. نه نقطه ی اعمال نیرو و line of action مورد نیاز هستند نه روشهای گرافیک جمع زدن. جهت یک گشتاور با ادامه دادن Line of action نیرو حول مرکز مقاومت جسم تعیین می گردد (تصویر 8-4، B).
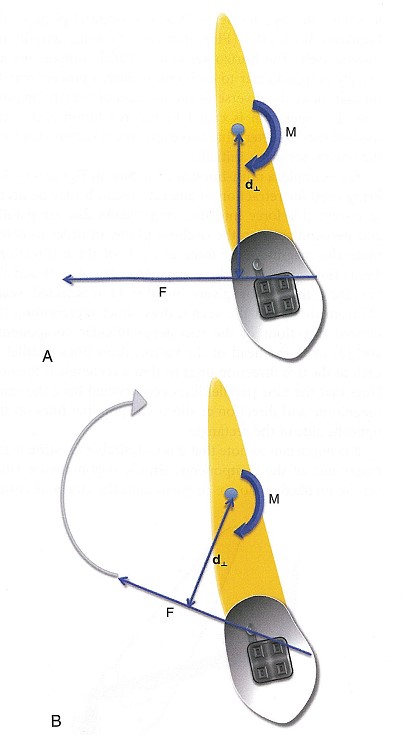
تصویر 8-4 A، گشتاور یک نیرو، معادل حاصلضرب اندازه ی نیرو در فاصله ی عمودی بین line of action و مرکز مقاومت است. B، می توان با امتداد دادن line of action حول مرکز مقاومت جسم، جهت گشتاور نیروی اعمال شده را مشخص نمود.
کوپل (یک نوع گشتاور)
کوپل نوعی از گشتاور است که توسط یک جفت نیروی موازی هم اندازه اما با جهات مخالف هم تولید می شود. از آنجا که این نیروها مقادیر یکسانی و جهاتشان مخالف یکدیگر دارند، پتانسیل خالص این سیستم نیروی مخصوص برای translate کردن جسمی که به آن وارد می شود صفر است؛ بنابرین تنها چرخش وجود دارد.
یک کوپل معمولی در تصویر 9-4 نشان داده شده است. با وجود آنکه بردار کوپل در میانه ی بین دو نیرو ترسیم شده است، این بردار فاقد محل Line of action مخصوصی بوده و می تواند در هر نقطه ای از پلان کوپل رسم شود. بنابرین کوپل به عنوان یک “بردار آزاد” نیز شناخته می شود. این آزادی همراه با بردار کوپل، کاربردهای گسترده ای در ارتودنسی بالینی و پروسه های آنالیز نیروی خاصی دارد. به عنوان مثال صرف نظر از محل براکت روی دندان، یک کوپل وارده بر براکت تنها باعث ایجاد تمایل به چرخش دندان حول مرکز مقاومتش می گردد. این تمایل، گشتاور کوپل (Mc) نیز نام دارد.
میزان کوپل (Mc) وابسته به بزرگی نیرو و فاصله بین دو نیرواست. گشتاور ایجاد شده توسط یک کوپل در واقع جمع گشتاورهای ایجاد شده توسط دو نیرو است. اگر دو نیروی کوپل در دو سمت مقابل مرکز مقاومت نیرو اعمال شوند، اثر آنها، یک گشتاور تجمعی است؛ و اگر در یک سمت مرکز مقاومت نیرو وارد شوند، اثر آنها از هم کم می شود (تصویر 10-4). در هر حال هیچ نیروی خالصی توسط دندان حس نمی شود و تنها تمایلی برای چرخش خالص ایجاد می گردد.
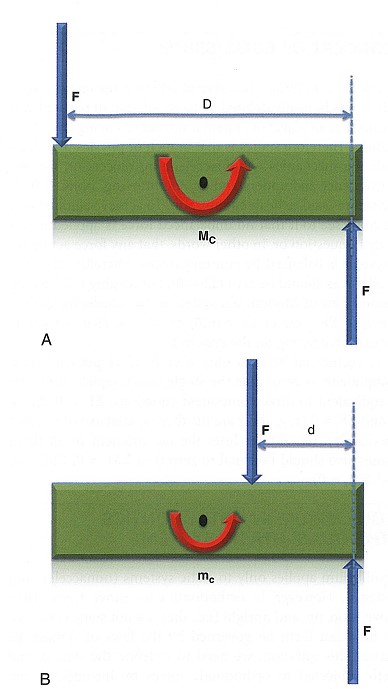
تصویر 9-4 A، گشتاور ایجاد شده توسط یک کوپل، همواره حول CRES یا CG قرار دارد (MC = F × d). B، کوپل، علی رغم محل اعمال این جفت نیرو، همواره حول حول CRES یا CG عمل می کنند. با کاهش فاصله ی بین دو نیرو (d < D)، میزان کلی کوپل کاهش می یابد (mc < MC).
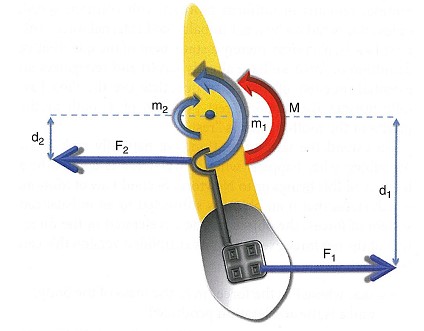
تصویر 10-4 کوپل توسط اعمال دو نیروی برابر و مخالف بر دندان ایجاد می شود. گشتاور کلی (M) جمع برداری دو گشتاور ایجاد شده (m1 و m2) توسط دو نیرو (F1 و F2) است. در اینجا، m1 = F1 × d1، m2 = F2 × d2 است. از آنجا که دو گشتاور غیر هم جهت هستند، یکی از آنها با علامت منفی و دیگری با علامت مثبت نشان داده می شود. گشتاور خالص (M) با جمع دو گشتاور محاسبه می گردد: M = m1 + (-m2).
تعادل و قوانین نیوتون
هرگز هیچ شیئ تنها تحت تاثیر یک نیروی منفرد قرار نمی گیرد. فاکتور اصلی ایجاد شتاب، نیروی خالص است که نیروی برآیند یا نیروی بالانس نشده نیز نام دارد. برای مثال، اگر دو نیروی مساوی و مخالف بر یک جسم وارد شوند، هیچ نیروی خالصی برای ایجاد شتاب، تولید نشده و سرعت جسم ثابت باقی می ماند. این وضعیت سرعت ثابت یا عدم وجود سرعت (rest)، تعادل نام دارد. برای مثال دندان ها در دهان در حالت سکون قرار دارند (یعنی برآیند نیروهای وارده بر دندانها صفر است). بنابرین با اصلی مهم در مکانیک مواجه هستیم به نام قانون اول حرکت نیوتون، که اغلب به آن قانون اینرسی هم می گویند. بر طبق این قانون اگر به یک جسم، نیروی خارجی غیر بالانس شده ی خالصی وارد نشود، آن جسم در حالت سکون باقی مانده و یا به حرکت خود با سرعت سابق خود ادامه می دهد. این قانون اول، تنها یک بیان کمّی از نیرو بوده، و یک خصوصیت ضروری ماده است که قبلاً در مورد آن توضیح داده بودیم. قانون اول در شرایط بالینی، سکون ذاتی دندان یا اینرسی دندان که “rest” است را توجیه می کند.
طبیعتاً، برای گسترش قانونهای حرکت باید قانونی را یافت که توضیح دهد با اعمال نیروی خالص به جسم چه اتفاقی خواهد افتاد. قانون دوم حرکت نیوتون بیان می کند که جسم در صورت مواجه با مجموعه ی نامتعادلی از نیروها، در جهت نیروی خالص اعمال شده شتاب خواهد یافت. نگارش ساده ی این قانون به این صورت است: F = ma، که در آن F نیرو، m جرم جسم، و a شتاب تولید شده است.
بالافاصله می توان دید که قانون اول تنها یک مورد خاص از قانون دوم است (یعنی نیروی خالص وارد بر جسم صفر است و بنابرین شتاب جسم نیز صفر است).
قانون سوم حرکت نیوتون (عمل و عکس العمل) مستقیماً مرتبط با اعمال روزانه ارتودنسی است. بر طبق این قانون، نیروها همواره به صورت جفت وارد می شوند. هر بار که سیم نیرویی به براکت وارد کند، براکت هم همان نیرو را به سیم وارد خواهد ساخت (تصویر11-4). در هنگام شنا کردن نیز فرد آب را به عقب هل می دهد و آب نیز بلافاصله فرد را به سمت جلو فشار می دهد؛ هم آب و هم فرد به یکدیگر نیرو وارد می کنند. چنین پدیده هایی را می توان به صورت زیر خلاصه نمود: هر زمان که جسمی نیرویی را به جسم دیگر وارد کند، جسم دوم نیز نیرویی را به جسم اول وارد می سازد؛ این نیرو ها هم اندازه هستند و در جهات مخالف وارد می شوند. نیوتون این جفت نیرو را عمل و عکس العمل نامید. توجه به این نکته ضروری است که این نیروها به اجسام متفاوت وارد می شوند و بنابرین قادر به خنثی کردن یکدیگر نیستند؛ و به این ترتیب نیروی خالص نیز صفر نمی شود.
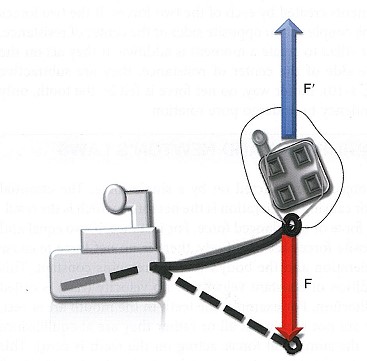
تصویر 11-4 یک فنر cantilever نیروی F را بر روی براکت اعمال می نماید (خط قرمز). با توجه به قانون سوم نیوتون، براکت نیز یک نیروی هم اندازه در خلاف جهت نیروی اول را (Fˊ) را بر روی سیم cantilever اعمال می کند (خط آبی).
مفهوم تعادل
واژه تعادل معانی متعدد متفاوتی را شامل می شود، اما در فیزیک استاتیک، در اصل به معنی یک وضعیت rest است؛ خصوصاً به این معنا است که یک جسم یا سیستم تحت هیچ گونه شتابی قرار ندارد. بنابرین علم استاتیک شاخه ای فیزیک است که با مکانیک اجسام بدون شتاب، یا (برای سهولت و فهم راحتتر ما) اجسام “غیر متحرک” سر و کار دارد. چنین سیستمی در تعادل قرار دارد. برای دست یابی به تعادل، نباید هیچ نیروی نامتعادلی به جسم وارد شود؛ به بیان دیگر، هر نیرویی که به سیستم وارد می شود باید توسط نیروهای مخالفش خنثی و متعادل شود. بنابرین برآیند نیروها باید صفر شود ( ΣF = 0). (طبق قانون دوم نیوتون، اگر سیستمی دارای شتاب نباشد درنتیجه a = 0، بنابرین ΣF = ma یا ΣF = m(0) یا ΣF = 0. بنابرین هیچ نیروی خالصی بر سیستم وارد نمی شود.)
یک بردار تنها در صورتی صفر می شود که مولفه های عمودی اش صفر باشند؛ در نتیجه ی یک معادله ساده برداری، ΣF = 0 معادل با سه معادله اجزای سازنده ی آن است: ΣFx = 0 ، ΣFy = 0 ، و ΣFz = 0 ( x، y و z سه محور فضایی هستند که پیش از این توضیح داده شد). به همین ترتیب، تمام گشتاورهای خالص در هر سه پلان نیز باید معادل صفر باشد (یعنی، ΣMx = 0، ΣMy = 0، و ΣMz = 0).
تعادل در ارتودنسی
(سیستم quasi-static)
تعادل تنها در سیستم های ساکن (غیر شتاب دار) صدق می کند. با این وجود، ما در ارتودنسی دندان ها را حرکت می دهیم. دندان ها جابه جا شده، متوقف، tip و Upright می شوند (یعنی دندانها یک سیستم استاتیک نیستند). پس چگونه می توان دندان را مشمول قوانین استاتیک نمود؟ برای پاسخ به این سوال باید وضعیت دندان های تحت نیروی ارتودنسی را با معرفی مفهوم سیستم های نیمه استاتیک ( یا پروسه های نیمه ترمودینامیک) تعریف نمود. این مفهوم، سیستم یا پروسه ای است که یک توالی از وضعیت هایی را طی می کند که به میزان بسیار کمی شبیه به تعادل است ( یعنی این پروسه، بسیار به کندی صورت می گیرد و یک توالی از وضعیت های مختلف دندان را شامل می شود که در هر لحظه ی خاص نزدیک به تعادل هستند). زمانیکه دستگاه های ارتودنسی فعال شده و وارد می شوند، حرکت دندانی که رخ می دهد خیلی کم بوده و در دوره زمانی به نسبت طولانی رخ می دهد. در طی این پروسه، هر زمان که به درون دهان بیمار نگاه کنید هیچ حرکتی نمی بینید؛ با این وجود پس از گذشت زمان کافی، حرکت دندانی مشخص می شود. بنابرین، می توان در هر لحظه آنالیز نیرو را توسط قوانین تعادل، و بدون اعمال خطای قابل ملاحظه ای انجام داد. به بیان دیگر، اینرسی هر جزء دستگاه یا دندان، کوچکتر و قابل صرف نظر کردن است. به همین دلیل قوانین فیزیک استاتیک برای توضیح سیستم های آنی نیرو که توسط دستگاههای ارتودنسی تولید می شود کافی هستند. با این وجود، این قوانین قادر به توصیف نحوه ی تغییر سیستم های نیرو با حرکت دندان، و غیرفعال شدن و تغییر ترکیب دستگاه، نیستند. راه حل مشکلات موجود در فیزیک استاتیک دربرگیرنده ی نیرو ها و گشتاور ها، استفاده از ابتکار و منطق است. هیچ قوانین ساده ای برای توضیح این روندها وجود ندارند. شایعترین خطا، عدم موفقیت در تعیین جسمی است که تعادل آن بررسی می گردد. باید بیاموزید که تمام نیروهای موثر بر جسم را در نظر بگیرید. البته در این راستا، قوانین دوم و سوم نیوتون کمک بسیاری می کنند. با استفاده از قانون سوم می توان به راحتی فهمید که اگر دستگاه نیرویی به یک دندان وارد کند، دندان نیز همان نیرو را به دستگاه اعمال می کند (تصوبر 11-4 را ببینید)، و همین قوانین به تمام دندانهای دیگری که دستگاه به آنها متصل است نیز اعمال می شود. با توجه به اینکه دستگاه متحرک نیست، جمع تمام نیروها و گشتاورهای تولید شده توسط دستگاه باید صفر باشد.
قوانین سیستم های نیروی معادل
اصل سیستم های نیروی معادل، راه برآزنده ای برای تعریف مجدد نیروها و گشتاورهای موثر بر یک جسم است. این اصل نه تنها به تجسم حرکت translatory کمک می کند؛ بلکه حرکات چرخشی، tip و تورک را نیز توصیف می کند. یک سیستم نیروی معادل، سیستمی از نیروها و گشتاورها است که می تواند با یک سری از نیروها و یا گشتاورهای متفاوت دیگر جایگزین شود و هم چنان همان رفتار translation یا چرخشی اولیه ی خود را نشان دهد. برای فهم کاربردهای بالینی این اصل، بیاید یک سیستم نیروی وارده بر مولر را جابه جا کنیم.
کاربرد سیستم ها نیروی معادل:
جابه جا کردن سیستم نیرو به محل متفاوت
تصویر 12-4 نیروی وارده بر یک دندان را در نقطه ی A (FA) نشان می دهد. حالا فرض کنید که شما می خواهید اثرات این سیستم نیرو را در محل متفاوتی، مثلاً نقطه B که در این مثال CRES مولر هست، بررسی کنید ( بخاطر بسپارید که CRES مولر به طور دلخواه انتخاب شده و نقطه B می تواند هر نقطه دیگری روی مولر باشد). برای تعیین اثر transational ، دو نیروی مساوی با جهات مخالف (+FAˊ و FAˊ-) را در نقطه B رسم نمایید. این کار به آسانی انجام می شود، چون از آنجایی که دو نیرو مساوی و با جهات مخالف یکدیگر هستند، برآیند آنها صفر بوده + (-FAˊ) = 0 +FAˊ، و سیستم را به هیچ نحوی متاثر نمی سازند. از برابری این دو نیرو با نیروی FA که در نقطه A وارد می شود اطمینان حاصل نمایید. اکنون، نیروی اولیه FA با اعمال قانون جمع برداری، با نیروی منفی FAˊ- خنثی می شود. با در نظر گرفتن این مطلب، اکنون می بینید که تنها نیرویی که بر روی مولر باقی مانده FAˊ است که در نقطه B وارد شده است. تبریک می گوییم! شما نیرو را جابه جا کرده اید.
حالا که نیرو را جابه جا کرده اید، دو نیروی دیگر روی مولر را بررسی کنید: FA در نقطه ی A و FAˊ- در نقطه ی B. این دو نیرو موازی یکدیگر بوده، در جهات مخالف وارد می شوند و در فاصله (d) از هم قرار دارند. این مدل در واقع تعریف اولیه ی یک گشتاور (کوپل) است که قبلاً توضیح داده شده است. به خاطر بسپارید که گشتاورها و کوپل ها باعث چرخش جسم می گردند؛ در نتیجه زمانی که می خواهید یک نیرو را جابه جا کنید، باید این اثر چرخشی را نیز اعمال نمایید. بعلاوه، نیروی کوپل یک بردار آزاد است؛ بنابرین، صرف نظر از محل اعمالش روی یک جسم، همان رفتار چرخشی یکسان را نشان می دهد. در نتیجه، در صورت حفظ اندازه و جهت بردار گشتاور، می توانید گشتاور یک کوپل را به طور آزادانه به نقطه ی B ببرید. میزان این گشتاور را می توان با ضرب FA یا FAˊ- در d محاسبه نمود (MA = FA× d). نقطه اعمال گشتاور یا کوپل در زمان ایجاد سیستم نیروی معادل، اهمیتی ندارد. اگر می خواهید گشتاوری را حرکت دهید، آنرا حرکت دهید.
به طور خلاصه، برای جابه جا کردن یک سیستم نیرو، تنها باید نیروی اولیه را به محل جدید ببرید و گشتاور جدید (که ناشی از نیرو و فاصله بین دو نقطه است) را با حفظ جهت و علامت خود به آن اضافه نمایید.
دو قانون ساده وجود دارند که اجازه ی محاسبه ی سیستم های نیروی معادل را می دهند. دو سیستم نیرو زمانی معادلند که (1) جمع نیروها در هر سه پلان فضایی (x، y و z) برابربوده و (2) جمع گشتاورها در حول هر نقطه ای، یکسان باشند.
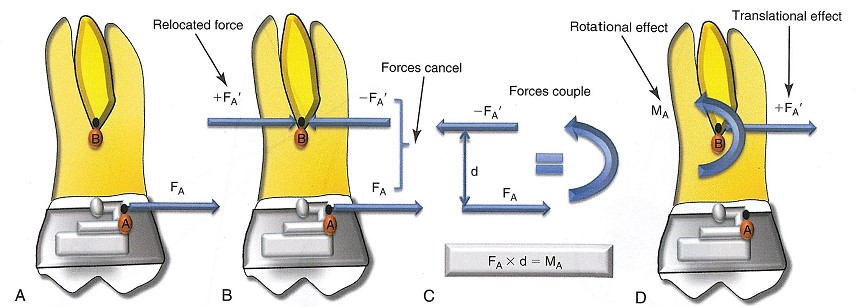
تصویر 12-4 ایجاد سیستم های نیروهای معادل. اثر خالص نیروی نشان داده شده در تصویر A و D یکسان است. B و C نشان می دهند که چگونه می توان A را به B تبدیل نمود.
مرکز چرخش
مرکز چرخش نقطه ی ثابتی است، که یک جسم دو بعدی از موقعیت اولیه تا نهایی خود، حول آن می چرخد. (دقت کنید که یک جسم دو بعدی همواره حول یک نقطه می چرخد، درحالیکه یک جسم سه بعدی حول یک محور می چرخد؛ بنابرین، جسم دوبعدی دارای مرکز چرخش و جسم سه بعدی دارای محور چرخش است.) به بیان دیگر، در حین چرخش، تنها نقطه ای که حرکت نمی کند، مرکز چرخش نام دارد (CROT) (تصویر 13-4). مابقی پلان، حول این نقطه ثابت می چرخد. با وجود اینکه یک مرکز چرخش منفرد را می توان از هر موقعیت آغازین و انتهایی روی دندان به دست آورد، به این معنی نیست که آن نقطه ی منفرد حقیقتاً در کل حرکت به عنوان مرکز چرخش عمل کرده است. دندان می تواند با طی یک مسیر نامنظم به محل نهایی خود رسیده باشد، به طوریکه اول در یک جهت و سپس در جهت دیگرtip شده باشد. نیروهای اعمال شده به دندان، با حرکت آن، مداوماً دچار تغییرات جزئی می گردند؛ بنابرین یک مرکز چرخش متغیر، بیشتر یک قانون است تا اینکه یک استثناء باشد. در تعیین رابطه ی بین سیستم نیرو و مرکز چرخش حرکت ناشی از آن، تنها چیزی که میتواند به طور واقعی تعیین شود، مرکز “آنی” چرخش است.5

تصویر 13-4 مرکز چرخش (نقطه ی قرمز) یک دندان. توجه کنید که مرکز چرخش تنها نقطه ای است که ثابت باقی مانده است.
تعیین مرکز چرخش
میتوان همان گونه که در تصویر 14-4 نشان داده شده است، CROT را به آسانی محاسبه نمود. هر دو نقطه دلخواه را روی دندان در نظر بگیرید و محل قبل و بعد هر یک از آنها را با یک خط به هم وصل کنید. محل تقاطع عمود منصف های این خطوط، مرکز چرخش است.6
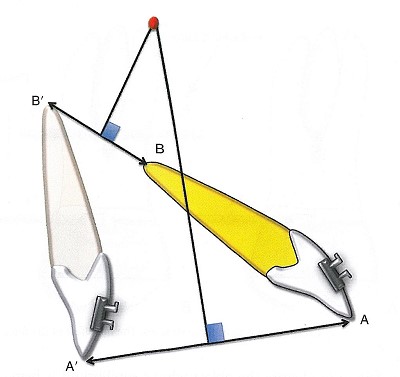
تصویر 14-4 نقاط A و Aˊ نوک کاسپ را قبل و بعد از حرکت نشان می دهند. یک خط متصل کننده ی این نقاط کشیده شده است. یک خط عمود نیز از نقطه ی میانی این خطوط ترسیم شده است. می توان خط عمود مشابه دیگری را نیز به همین ترتیب ترسیم نمود. محل تقاطع این دو عمود منصف، مرکز چرخش (نقطه ی قرمز) را نشان می دهد.
انواع حرکت دندانی (تصویر 15-4)
همانطور که در بخش پیش گفته شد، مرکز چرخش، کلید تعیین ماهیت حرکت دندان است. کنترل کردن CROT ، به طور خودکار کنترل دقیقی را بر نوع (و گستره ی) حرکت دندان، فراهم می کند. زمانی که یک نیروی منفرد بر دندان وارد شود، دندان در جهت نیروی اعمال شده حرکت می کند. بعلاوه، دندان، بسته به فاصله ی نیرو از CRES ، یک گشتاور (MF) را حول CRES تجربه می کند. ترکیب نیرو و گشتاور باعث چرخش دندان در حین حرکتش می شود و CROT را اندکی اپیکال تر از CRES قرار می دهد. 1و5و7 این نوع حرکت دندانی، tipping ساده یا tipping کنترل نشده، نام دارد. می توان به آسانی تجسم کرد که اینجا تاج و ریشه در خلاف جهت یکدیگر، حرکت می کنند. حرکت Tipping میتواند بر حسب محل CROT در طول دندان، به صورت های مختلفی انجام شود. با این وجود، این حرکت، برای تسهیل طبقه بندی، به دو گروه تقسیم می شوند:
- Tipping کنترل شده: CROT حین چنین حرکتی، در اپکس ریشه قرار دارد. دندان مشابه آونگ روی ساعت حرکت می کند، به نحوی که اپکس در یک نقطه خاص ثابت شده و تاج از یک سمت به طرف دیگر حرکت می کند.
- حرکت ریشه: اینجا CROT در نوک تاج قرار دارد و ریشه آزاد است تا در جهت نیرو حرکت کند. این حرکت در منابع ارتودنسی به طور متداولی به عنوان حرکت tipping طبقه بندی نمی شود، بلکه این حرکت تنها از نظر مکانیک، مشابه tipping کنترل شده است.
تقریباً تمام دنیای حرکت دندانی متشکل از tipping تاج، (ندرتاً) ریشه، و یا (شایعترین) ترکیب هر دو است. با این وجود، یک حرکت بسیار نادرنیز وجود دارد که به سختی قابل دست یابی است: translation که گاهی اوقات آنرا حرکت bodily هم می نامند. در این جا هم تاج و هم ریشه به یک اندازه و در یک جهت، بدون هیچ چرخشی حرکت می کنند. در این مورد CROT وجود ندارد، یا به بیان ریاضی به بینهایت می رود.
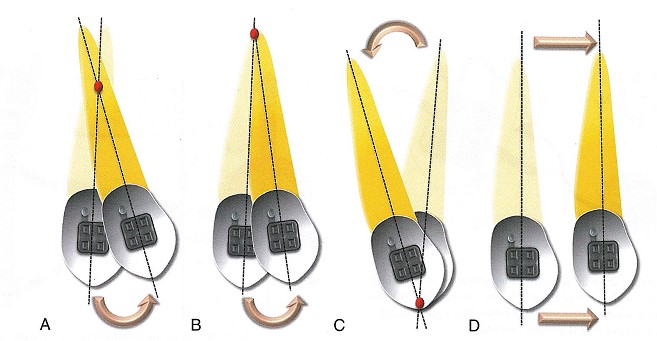
تصویر 15-4 انواع حرکات دندانی. A، tipping کنترل نشده. B، tipping کنترل شده. C، حرکت ریشه (تورک). D، حرکت translation یا bodily. مرکز چرخش در تمام موارد، با یک نقطه ی قرمز نشان داده شده است. دقت کنید که مرکز چرخش حین حرکت translation (D) در بی نهایت قرار دارد، یا به بیان دیگر، اصلاً مرکز چرخشی وجود ندارد.
نسبت گشتاور به نیرو (M/F)
شایعترین حرکت دندانی در ارتودنسی معمول، tipping کنترل نشده است؛ اما این حرکت، همیشه حرکت دلخواهی نیست. برای تغییر این الگوی حرکت دندانی و ایجاد یک الگوی جدید، باید سیستم نیروی وارد به دندان را تغییر داد. دو روش اصلی برای دست یابی به این امر، برحسب مکانیک دخیل، وجود دارد:
- تغییر نقطه ی اعمال نیرو (تصویر 16-4): یک راه ساده ی آن، اعمال نیرو در نقطه ای نزدیکتر به CRES دندان است. می توان یک rigid attachment که اغلب power arm نام دارد را به براکت روی دندان متصل نمود. سپس، نیرو را به این Power arm اعمال نمود. به این ترتیب خط نیرو به یک محل جدید منتقل شده و فاصله اش از CRES تغییر می کند. به این صورت گشتاور نیرو هم تغییر می کند. برای مثال اگر power arm ، بلند و rigid فرم داده شود و از CRES دندان بگذرد، می توان بازوی گشتاور (MF) را به کل حذف نمود زیرا نیرو اکنون از مرکز مقاومت دندان می گذرد. این روش به زیبایی در هنگام تغییر دادن حرکت tipping تاج عمل می کند؛ با این وجود، این روش در حرکتهایی که به سطوح بالاتری از کنترل نیاز دارند (مثل translation و حرکت ریشه)، به مشکل برمی خورد. بازوهای طویل می توانند با گسترش به درون وستیبول و تجاوز به لثه یا گونه، باعث آزار بیمار شوند. در ضمن، بازوها گاهی اوقات به اندازه کافی rigid نبوده و تحت تاثیر نیرو دچار درجاتی از خمش می گردند. (یک مورد بالینی از حرکت translation با استفاده از power arm در فصل 6 توضیح داده شده است.)
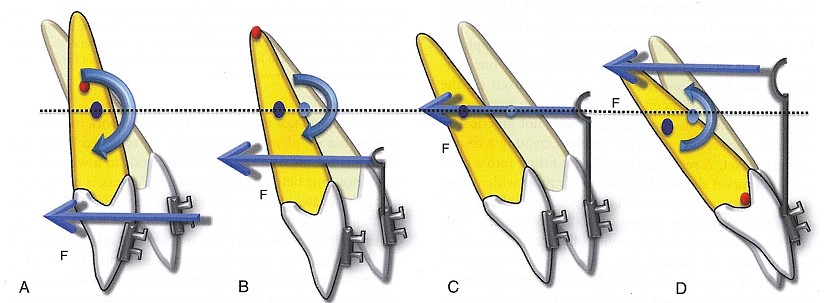 تصویر 16-4 کاربرد یک power arm به منظور ایجاد انواع مختلفی از حرکات دندانی. توجه نمایید که نیرو از A تا D، ثابت نگه داشته شده است. A، حرکت tipping کنترل نشده، بدون power arm. B، حرکت tipping کنترل شده که توسط یک power arm در زیر مرکز مقاومت دندان ایجاد شده است. C، حرکت translation، چرا که با افزایش طول power arm، عبور نیرو از مرکز مقاومت دندان امکان پذیر شده است. D، حرکت ریشه به همراه حداقل حرکت تاج؛ در اینجا، power arm به ورای مرکز مقاومت گسترش یافته است. (نقطه ی قرمز، مرکز چرخش بوده و نقطه ی آبی، مرکز مقاومت دندان را نشان می دهد.) توجه کنید که چگونه با افزایش یا کاهش فاصله ی نقطه ی اعمال نیرو از مرکز مقاومت، میزان MF نیز افزایش یا کاهش می یابد.
تصویر 16-4 کاربرد یک power arm به منظور ایجاد انواع مختلفی از حرکات دندانی. توجه نمایید که نیرو از A تا D، ثابت نگه داشته شده است. A، حرکت tipping کنترل نشده، بدون power arm. B، حرکت tipping کنترل شده که توسط یک power arm در زیر مرکز مقاومت دندان ایجاد شده است. C، حرکت translation، چرا که با افزایش طول power arm، عبور نیرو از مرکز مقاومت دندان امکان پذیر شده است. D، حرکت ریشه به همراه حداقل حرکت تاج؛ در اینجا، power arm به ورای مرکز مقاومت گسترش یافته است. (نقطه ی قرمز، مرکز چرخش بوده و نقطه ی آبی، مرکز مقاومت دندان را نشان می دهد.) توجه کنید که چگونه با افزایش یا کاهش فاصله ی نقطه ی اعمال نیرو از مرکز مقاومت، میزان MF نیز افزایش یا کاهش می یابد.- تغییر نسبت گشتاور به نیرو (تصویر17-4): یک روش جایگزین برای تغییر حرکت دندان، دستکاری بخش چرخشی نیروی اعمال شده است (یعنی MF). این روش با افزودن یک گشتاور counterbalancing (یعنی گشتاوری در جهت مخالف MF) به سیستم صورت می گیرد. می توان این گشتاور جدید را به دو روش ایجاد کرد. روش اول، راه متعارف اعمال یک نیرو است (این نیرو متفاوت با نیروی سازنده MF است). با این حال، با وجود تنها یک براکت متصل به دندان، اعمال نیرو به نقطه ی دیگر، کار دشواری است. بنابرین این روش معمولاً عملی و کارا نیست. روش دوم شامل ایجاد یک کوپل در براکت است. یک آرچ وایرrectangular که در rectangular slot یک براکت قرار داده می شود، شایعترین روش مورد استفاده است. این گشتاور جدید (Mc) به همراه نیروی اعمال شده، ماهیت حرکت دندانی را تعیین می کند. این ترکیب به طور شایعی به عنوان نسبت گشتاور به نیرو (Mc/F ratio) شناخته می شود. با تغییر این نسبت می توان کیفیت حرکت دندانی را به tipping، translation و حرکت ریشه تغییر داد (به این معنی که با تغییر اندازه ی کوپل و نیروی اعمال شده، مراکز چرخش متفاوتی در طول محور طولی دندان ایجاد می شوند). در ارتباط با جهت نیز، گشتاور کوپل (Mc) تقریباً همیشه در جهت مخالف گشتاور نیرو (MF) حول CRES است.
دقت کنید که در ارتودنسی، گشتاورها با گرم-میلیمتر و نیروها با گرم اندازه گیری می شوند؛ بنابرین، واحد نسبت بین این دو، میلیمتر است. این نسبت هم چنین بیانگر فاصله ای از براکت است، که در آن، یک نیروی منفرد قادر به ایجاد همین اثر (یعنی از طریق power arm) باشد.
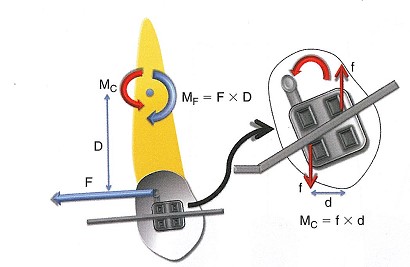
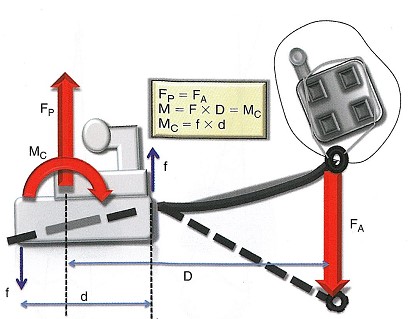
تصویر 18-4 یک نمای شماتیک، سیستم نیروی یک-کوپل را نشان می دهد. گشتاور (M) تولید شده توسط سیستم، حاصل نیروی اعمال شده و فاصله ی (D) بین دو نیرو است، و منجر به چرخش کل سیستم می گردد. این سیستم، مانند هر سیستم rigid دیگری، باید در تعادل قرار داشته باشد. به بیان دیگر، باید جمع تمام نیروها و گشتاورهای اعمال شده به آن، برابر با صفر باشد. به این ترتیب باید دو نیروی FA و FP با یکدیگر برابر باشند. علاوه بر این، گشتاور ناشی از کوپل (MC) درون تیوب نیز باید برابر با گشتاور سیستم (M) باشد. MC توسط تماس سیم با لبه های تیوب ایجاد می شود که خود تولید کننده ی نیروهای (f) نشان داده شده با رنگ آبی است.
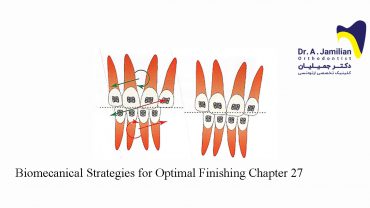
سیستم های نیروی ارتودنسی: اعمال قوانین مکانیک
با توجه به بحث قسمت گذشته مشخص است که حرکت ارتودنسی دندان از قوانین خاص مکانیک کلاسیک یا نیوتونی تبعیت می کند، که برای اعمال نوع خاصی از حرکت باید به درستی درک شوند. گام بعد از تسلط بر روی این قوانین، اعمال آنها است. به یاد داشته باشید که قوانین فیزیکی یا براکتهای روی دندانها، به خودی خود دندانها را حرکت نمی دهند. آنها باید در ترکیب با یک سری از سیم ها به منظور تولید نیروها و گشتاورهای لازم برای حرکت دندانها به کار روند. قرار دادن خم ها در نقاط استراتژیک یک سیم بین دو یا چند براکت، یک روش استفاده از این قوانین برای حرکت قابل پیش بینی دندانها است. این بخش اغلب در حین مرحله finishing درمان انجام می شود. روش دیگر، زاویه دار کردن براکت ها نسبت به یکدیگر است تا همین نیروها و گشتاورها ایجاد شوند. این اتفاقی است که در مراحل اولیه درمان روی می دهد؛ یعنی زمانیکه دندانها مرتب نیستند و یک سیم مستقیم درون براکتها قرار می گیرد تا آنها را مرتب کند. بیایید این دو موقعیت را به صورت جزئی بررسی کنیم:
در کل، خمهای روی سیم بین دو براکت یا attachment ، و سیم مستقیم بین براکت ها و attachment های نامرتب، برحسب نحوه ی درگیر شدن سیم درون براکت ها، قادر به ایجاد دو نوع سیستم نیرو هستند:
- سیستم نیروی یک کوپل
- سیستم نیروی دو کوپل
سیستم های نیروی یک-کوپل
وسایل ارتودنسی که قادر به تولید دقیقترین و مهیج ترین حرکات دندانی هستند، اغلب از دید بیومکانیک، ساده ترین دستگاهها نیزهستند. زمانی که یک کوپل در انتهای یک attachment و یک نیروی منفرد در انتهای attachment دیگر ایجاد شود، این سیستم نیرو بین دو attachment به وجود می آید. این سیستم، معمولاً شامل یک سیم خم شده است که در یک انتها وارد یک براکت یا تیوب شده و در انتهای دیگر به جای اینکه وارد براکت یا تیوب شود تنها به attachment گره زده می شود؛ به نحوی که، تنها یک نقطه تماس ایجاد شود. بنابرین، به این سیستم ، سیستم نیروی یک براکتی نیز گفته می شود (تصویر 18-4). این سیستم، بخاطر طراحی ساده ی نیروهای عمل و عکس العمل، قادر به تولید determinate force system است (یعنی تمام نیروها و گشتاورهای تولید شده در چنین سیستمی، قابل تشخیص، اندازه گیری و ارزیابی با دقت قابل توجهی هستند). تعدادی وضعیت بالینی وجود دارد که در آن از چنین سیستمی استفاده می کنیم. برخی از آنها در فصل 8 توضیح داده شده اند.
یک فنر cantilever جز ضروری تمام دستگاههایی است که از سیستم نیروی یک-کوپل استفاده می کنند. تصویر 18-4 مکانیک های دخیل در زمان استفاده از فنر cantilever در اکستروژن دندان کانین را نشان می دهد. مکانیک نشان داده شده قابل تعمیم به تمام سیستم های نیرو یک کوپل است. دقت کنید که فنر تنها به براکت یا attachment گره زده شده و وارد slot براکت نشده است؛ بنابرین، تنها یک نقطه تماس بین سیم و attachment وجود داشته و نیروی منفردی ایجاد می کند که برخلاف تماس دو نقطه ای در براکت دیگر، هیچ کاپلی ندارد. از آنجا که چنین سیستم شبه استاتیکی (نه سیم و نه attachment در هر لحظه آنی خاصی حرکت نمی کنند) یک سیستم rigid است، از قوانین تعادل تبعیت خواهد نمود. بنابرین، گشتاور درون تیوب (Mc) باید با گشتاور دیگری در جهت مخالف با اندازه برابر (M) خنثی شود. این گشتاور (M) توسط نیروهای برابر و مخالف (FA و FP) در attachment ها تولید می شود. این نیروها نیز از قوانین تعادل تبعیت می کنند. (نکته: نیروهای برابر و مخالفی که در دو attachment می بینید حاصل قانون سوم حرکت نیوتون نیستند.)
در سطح بالینی، پایدارترین روش، برای استخراج سیستم نیرویی که توسط هر دستگاه ارتودنسی تولید می شود، این است که سیم فعال شده را از attachment خود جدا کنیم و آن را به طور غیر فعال روی ناحیه attachment قرار دهیم. زاویه تشکیل شده بین سیم و براکت ها، جهت کاپل تولید شده در ناحیه ی engagement را در سمتی که بزرگترین زاویه بین سیم و براکت تشکیل شده، نشان می دهد.8-10
سیستم های نیرو دو-کوپل
زمانیکه یک سیم در slot براکت های دو براکت یا تیوب وارد شود، سیستم نیروی دو-کوپل برقرار می شود. همانگونه که از اسم آن پیدا است، این سیستم های نیرو شامل نیروها و کوپل هایی در هر دو attachment می شوند که در یک سیم مستقیم بین یک جفت براکت نامرتب و یا یک سیم دارای خم بین دو براکت مرتب ایجاد می گردد. بنابرین این سیستم، به نام سیستم نیروی دو-براکت نیز شناخته می شود. دینامیک این واحد دو براکتی، در فهم قوانین مکانیکی هدایت حرکت دندانها توسط مکانیک های sliding ، حائز اهمیت بنیادی است.
این سیستم در مقایسه یا سیستم نیروی قبلی (یعنی سیستم های نیروی یک-کوپل) شامل یک سیستم نیروی indeterminate است (یعنی برای تعیین “دقیق” تمام نیروها و گشتاورهای دخیل در هر دو attachment در هر زمان خاص، بیش از حد پیچیده است). وارد کردن سیم به درون یک attachment و استفاده از یک گیج نیرو برای اندازه گیری نیروی لازم برای deflect کردن سیم در براکت دیگر، لزوماً ارزیابی صحیحی از نیروی تولید شده توسط سیم به دست نمی دهد. در این سیستم، زمانیکه سیم بر روی slot دو براکت، یعنی جایی که قرار است به آن وارد شود، قرار می گیرد، زاویه ورودی سیم در هر slot براکت نشان دهنده ی آن است که کدام براکت زاویه ورود بیشتر و به تبع آن گشتاور بیشتری خواهد داشت. این امر از آنجا مهم است که صرف نظر از جهت گشتاور در براکت دوم، گشتاور بزرگتر جهت خالص نیروهای تعادلی وارد شده بر هر براکت را دیکته می کند.
همانگونه که قبلاً گفته شد، سیستم نیروی دو-براکت را می توان با دو روش متفاوت ایجاد کرد که به تفصیل در مقالات ارتودنسی توضیح داده شده اند 11-13: (1) سیم مستقیم قرار داده شده در براکت زاویه دار(روش superposition) و (2) سیم زاویه دار (خم شده) در براکت های مرتب (روش subtraction)
سیم مستقیم قرار داده شده در براکت های زاویه دار
این روش به ارتودنتسیت اجازه می دهد سیم مستقیم را در براکت های نامرتب به کار ببرد. این کار باعث تحریک فعال شدن سیستم نیرو می شود. می توان سیستم نیرو را با افزودن خم های مناسبی که نیروی آنها با سیستم نیروی سیم مستقیم جمع می شود، تقویت نمود. این تکنیک روش “superposition” نام دارد و اغلب درمراحل ابتدایی و level و align کردن درمان ارتودنسی و گاهاً در حین مراحل finishing و زمانیکه محل براکت ها برای تصحیح ریشه تغییر داده می شود، به کار می رود.
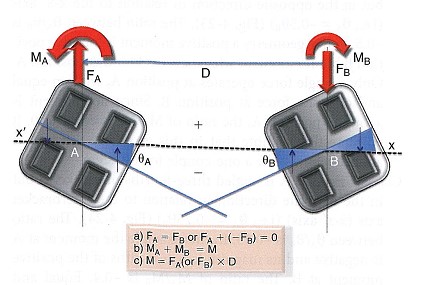
گام اول در فهم این روش، توصیف دقیق سیستم است. تصویر 19-4 نحوه ی عملکرد این سیستم را نشان می دهد. محور بین براکتی (D) مرکز دو attachment را به هم متصل می کند. به این محور، فاصله بین براکتی یا محور x-xˊ نیز می گویند. هر دو براکت با این محور افقی زاویه ای می سازند. هر دو قسمت سیم-attachment، در صورت مشخص بودن D و زوایای θA و θB به طور کامل تعریف می شوند. برحسب زاویه و میزان فاصله بین براکتی، راههای بیشماری برای قرار دادن براکت ها نسبت به یکدگیر وجود دارد. هر هندسه یا نحوه ی آرایش براکت ها را می توان با نسبت زاویه براکت ها به محور x-xˊ تعریف نمود. هر هندسه دارای سری اختصاصی سیستم های نیروی خود بوده و توسط یک “class” معرفی می شود. بیایید هر کلاس را به صورت جداگانه بررسی کنیم.
در حالیکه ما کلاسهای مختلف را معرفی می کنیم، خواننده یک تغییر تدریجی در θA را مشاهده خواهد کرد، در حالیکه زاویه θB ثابت نگه داشته می شود. از آن جا که، به طور قراردادی θA همواره مساوی یا کوچکتر از θB است، می توان صرف نظر از دندانهای درگیر، 6 کلاس را برای توصیف هر قسمت دو-دندانی به کار برد. یک روش ثابت علامت گذاری قرار دادی، نیز برای توصیف زاویه براکت ها به کار می رود. زاویه براکت، هم علامت با گشتاور لازم برای قرار دادن سیم در براکت است. اگر محور براکت (خط آبی) در هر نقطه ای به زیر محور x-xˊ برود، علامت قراردادی برای زاویه تشکیل شده (θA یا θB ) منفی (-) خواهد شد. تمام نیروهای رو به پایین و گشتاورهای خلاف عقربه ساعت نیز منفی هستند.
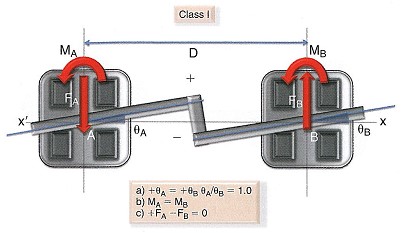
کلاس I: در این جا دو براکت نسبت به محور بین براکتی هم جهت بوده و دارای زاویه مساوی هستند (یعنی θA = θB ، و / θB = 1.0 θA )(تصویر 20-4). دو گشتاور برابر هستند؛ و نسبت MA/MB = 1 است. با وجود آنکه ممکن است اندازه ی گشتاورها بسته به میزان فعال سازی و فاصله بین براکتی تغییر کند، نسبت MA به MB همواره در کلاس I، 1+ می ماند. علاوه بر گشتاور، دو نیروی عمودی نیز تولید می شوند: یک نیروی منفی در محل A و یک نیروی مثبت در محل B. بر طبق قوانین تعادل نیروی A برابربا نیروی B است.
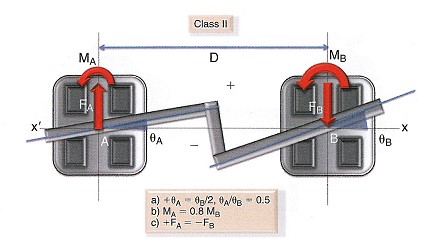
کلاس II: هندسه ی کلاس II با / θB = 0.5 θA مشخص می شود (تصویر 21-4). دو گشتاور مثبت در محلهای A و B در سیم ایجاد می شوند. بزرگی گشتاور A ، 0.8 برابر گشتاور در B ست. یک نیروی مثبت در A و یک نیروی منفی در B وجود دارد.
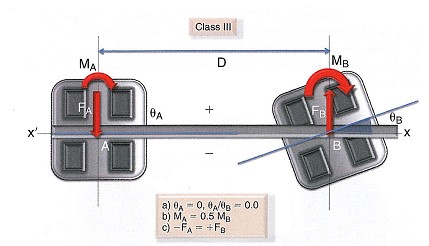
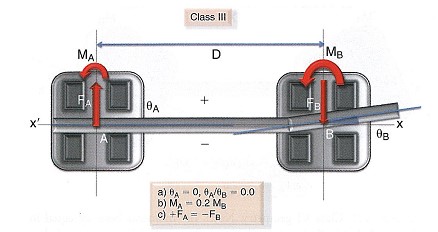
کلاس III: در هندسه کلاس III محور بین براکتی از براکتها می گذرد؛ به بیان دیگر، زاویه براکت A نسبت به محور x-xˊیا سیم، صفر درجه است (تصویر 22-4). بنابرین، / θB = 0 θA بوده و درنتیجه سیم قرار گرفته در براکت دندان کانین (A) از مرکز slot براکت قرار گرفته روی دندان پرمولر (B) می گذرد. بزرگی گشتاور در A، 0.5 برابر گشتاور در B است. یک نیروی مثبت در A و یک نیروی منفی در B وجود دارد.
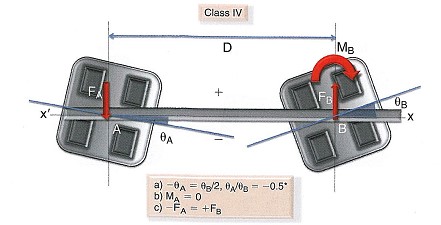
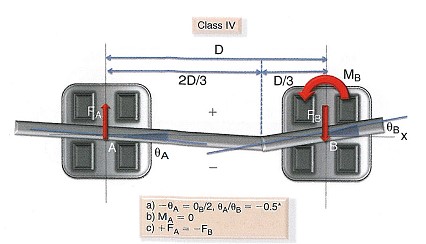
کلاس IV: در اینجا براکت A ، نصف زاویه ی براکت B را در جهت مخالف نسبت به محور x-xˊدارد (یعنی / θB = – 0.5 θA) (تصویر 23-4). نسبت بین / θB θA ، 0.5- است. یک گشتاور مثبت در B وجود دارد، اما هیچ گشتاوری در A وجود ندارد. بلکه تنها یک نیروی منفرد در A داریم که با نیروی B برابر و در جهت مخالف آن است. از آنجا که هیچ گشتاوری در محل A وجود ندارد MA/MB = 0 است. جالب توجه است که این هندسه تقریباً مشابه یک سیستم نیروی یک-کوپل عمل می کند.
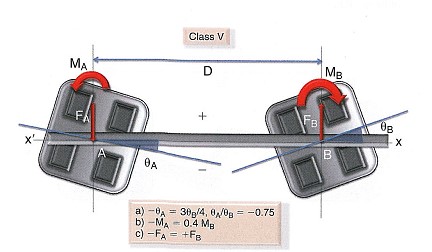
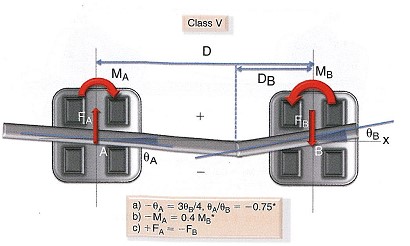
کلاس V: براکت A، دارای سه چهارم زاویه براکت B در جهت مخالف نسبت به محور بین براکتی ست. (یعنی / θB = – 0.75 θA) (تصویر 24-4). نسبت بین / θB θA ، 0.75- است. در این مثال گشتاور A منفی بوده و میزان آن دو پنجم گشتاور مثبت در نقطه ی B است. MA/MB = – 0.4. نیروهای عمودی مساوی و خلاف جهت با یکدیگر در نقاط A و B عمل می کنند.
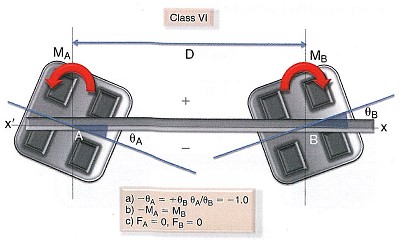
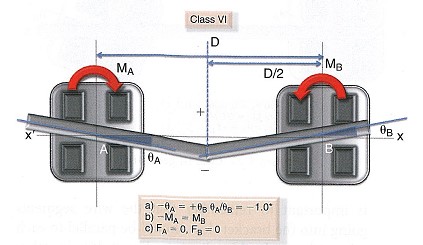
کلاس VI: در این کلاس، براکت A همان زاویه ی براکت B را در جهت مخالف دارد؛ به نحویکه، نسبت زوایا 1- است (یعنی / θB = – 1 θA) (تصویر 25-4). سیستم نیروی موثر بر سیم متشکل از گشتاورهای برابر و مخالف هم است (در A منفی و در B مثبت) (یعنی MA/MB = – 1). هیچ نیروی عمودی حضور ندارد.
این شش کلاس بالینی در حقیقت معرف یک توالی از سیستم های نیروی امکان پذیر هستند، که می توانند یک سیم بین دو براکت را در تعادل قرار دهند. نکته ی مهم، دانستن سیستم نیروی نسبی است، نه اندازه ی دقیق نیرو. برای مثال، می بینید که چگونه با رفتن از کلاس I به کلاس II وجلوتر، نیروهای عمودی کاهش می یابند، تا کلاس VI که دیگر هیچ نیروی عموی وجود ندارد. به بیان دیگر، می توانیم بگوییم که با کاهش نسبت θA/θB ، اندازه ی نیرو نیز کاهش می یابد. این مطلب به آسانی از معادله ی زیر در تصویر 19-4 دریافته می شود:
FA یا FB = MA + MB / D ، اینجاFB – FA =
گشتاورهای موجود در هر کلاس، و اینکه چگونه زاویه براکت قادر به تغییر آنها است، نیز از اهمیت بالایی برخوردار هستند. با تغییر نسبت θA/θB از یک کلاس به کلاس بعد، در یک وضعیت دینامیک (مثلا در سطح بالینی) ، سیستم نیرو روی سیم و درنتیجه بر روی دندانها به طور قابل ملاحظه ای تغییر می کند.
تصویر 19-4 هندسه ی سیم-attachment توسط فاصله ی بین براکتی (D) و زوایای براکت های A و B نسبت به خط مرجع افقی (محور x-xˊ) تعیین می شود. فلش های بنفش، چگونگی ایجاد کوپل توسط سیم درون براکت را نشان می دهند (MA یا MB ). نکته: معادله ای که در جدول آورده شده است، بدون استثنا، در تمام هندسه ها (کلاس I تا IV) صدق می کند.
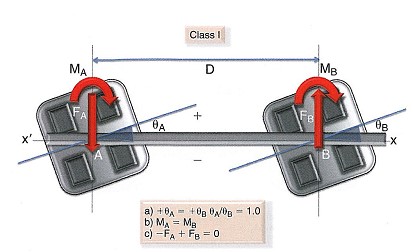
تصویر 20-4 هندسه ی کلاس I.
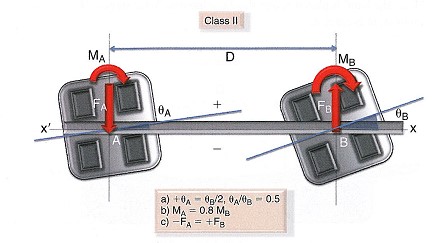
تصویر 21-4 هندسه ی کلاس II.
تصویر 22-4 هندسه ی کلاس III.
تصویر 23-4 هندسه ی کلاس IV. (*علامت منفی به این معنی است که براکت A، در خلاف جهت براکت B قرار گرقته است.) نکته: هیچ گشتاوری در براکت A وجود ندارد.
تصویر 24-4 هندسه ی کلاس V.
تصویر 25-4 هندسه ی کلاس VI. نکته: اینجا گشتاورها هم اندازه هستند اما در جهت مخالف یکدیگر قرار دارند. هیچ نیروی عمودی در این هندسه ایجاد نمی شود.
سیم های زاویه دار (خم شده) در براکت های مرتب
خم کردن سیمها در انتهای درمان ارتودنسی، یک اقدام درمانی شایع است. این کار، به افزودن آخرین جزئیات به یک مال اکلوژن به خوبی درمان شده، کمک می کند. هم چون روش superposition، وسعت بالایی از محل ها و انواع خم ها را میتوان تعبیه کرد. با این وجود، برای فهم دینامیک چنین خم هایی، می توان آنها را بر اساس نوع سیستم نیرویی که ایجاد میکنند، به طبقات زیر تقسیم نمود.
I: Step bends
II: Off-centered “V” bends
III: Centered “V” bends
در این روش مهم است که ابتدا سیم را به طور غیرفعال بین دو براکت قرار داد و سپس “V” bend و یا step bend مناسب را افزود. به بیان دیگر، این روش ابتدا سیستم های نیرویی که توسط یک سیم مستقیم در براکت های نامرتب ایجاد می شود را حذف نموده و سپس سیستم نیروی مطلوب را با افزودن خم به سیم ایجاد می کند. بنابرین از آن تحت عنوان روش subtraction هم یاد می کنند.
هر کدام از این خم ها از نظر نیروها و گشتاورهایی که در دو انتها ایجاد می کند، با بقیه متفاوت است. به یاد داشته باشید که این روش نتایج مشابهی با روش superposition که در بالا آورده شد، حاصل می کند؛ و هم چنین به هندسه های متعددی تقسیم می شود. انواع هندسه های این روش به گروه های زیر تقسیم می شود:
- Step bends. این خم ها، هندسه ی کلاس I و II توضیح داده شده در بخش قبل را بازسازی می کنند. آنها نیازمند دو خم، در هر جایی درون فاصله بین براکتی سیم هستند.
کلاس I: یک step در سیم بین دو براکت، نیروهای عموی هم اندازه و خلاف جهت هم به همراه کوپل های هم جهت با گشتاورهای هم اندازه تولید می کند (تصویر26-4). از آنجا که گشتاورها هم جهت و هم اندازه هستند، MA/MB = 1. این نسبت، سیستم نیروی نسبی ناشی از یک step در سیم را معرفی می کند، که مشابه نسبت کلاس I در سیم مستقیم همراه با براکت های موازی stepped است (نصویر 20-4). به یاد داشته باشید که جهت ایجاد هندسه کلاس I با ایجاد خم، قسمت های سیمی که وارد slot براکت ها می شوند باید با یکدیگر موازی باشند ( با خطوط آبی در تصویر 26-4 نشان داده شده اند)؛ به بیان دیگر زاویه ی خم ها باید مشابه و هم جهت باشند (یعنی θA = θB ، و / θB = 1.0 θA ).
حرکت دادن step در بعد مزیودیستال، سیستم نیروی مطلق یا نسبی را تغییر نمی دهد. هم چنین نسبت MA/MB = 1 نیز، مستقل از فاصله بین براکتی است و با step کوچکتر یا بزرگتر هم تغییر نمی کند.
کلاس II: این هندسه با ایجاد زوایای خمی نابرابر ایجاد می گردد، و اگر به طور ذهنی انتهای قطعات سیمی که به درون slot براکت می روند را ادامه دهیم خارج از بازه بین براکتی یکدیگر را قطع می نمایند (تصویر 27-4).
- Off-centered “V” bends. همانگونه که از اسمش پیدا است، یک “V” bend ، شامل قرار دادن تنها یک خم روی سیم در طول فاصله بین براکتی است. یک V bend، برخلاف یک step bend، بسته به محل مزیودیستال خم، به طور قابل ملاحظه ای سیستم نیرو را تغییر می دهد. بنابرین می توان این خم ها را بر اساس محل خم، به هندسه های زیر تقسیم نمود (کلاس III تا VI).
کلاس III: V bend بسیار نزدیک به یکی از براکت ها قرار داده می شود (تصویر 28-4). براکت نزدیک خم، گشتاور بزرگتری خواهد داشت؛ در حالیکه براکت دورتر، گشتاور بسیار کوچکتری دارد که با گشتاور دیگر هم جهت است.
کلاس IV: V bend در یک سوم فاصله بین براکتی قرار می گیرد. هیچ گشتاوری در براکت دورتر از خم وجود ندارد (تصویر 29-4).
کلاس V: خم به مرکز فاصله بین براکتی نزدیکتر شده است (تصویر 30-4). از این نقطه به بعد یک گشتاور بر روی براکت دورتر ایجاد می شود که دارای جهتی مخالف با گشتاور دیگر است.
- Centered V bends.
کلاس VI: وقتی یک V bend در مرکز قرار می گیرد، گشتاورهای برابر و مخالف هم تولید شده و در نتیجه هیچ نیروی عمودی ایجاد نمی شود (تصویر 31-4).
آنالیز سیستم های نیرو منجر به کاربردهای بالینی مهمی در استفاده از خم ها و قراردهی و زاویه دادن به براکت ها در درمان ارتودنسی روزمره شده است. باید مجدداً تاکید کنیم که درک سیستم نیروی نسبی (نه نیروی مطلق) ضروری است. در تمام هندسه های خم هایی که گفته شد، ارتفاع خم و فاصله بین براکتی، سیستم نیروی نسبی را تغییر نمی دهند؛ اما مشخصاً باعث تغییر نیروها و گشتاورهای مطلق خواهند شد. این آنالیز، هم چنین اساس آنالیز کردن سیستم های نیروی پیچیده تر و بغرنجتری که ممکن است در شرایط بالینی حقیقی تولید شود را شکل می دهد.
تصویر 26-4 step bend (خم ها به نحوی ایجاد شده اند تا دو خط آبی در موازات یکدیگر قرار گیرند)، هندسه ی کلاس I. نکته: صرف نظر از محل قرار گیری step bend بر روی سیم، اثر مشابهی خواهد داشت.
تصویر 27-4 step bend (خم ها 90 درجه نیستند)، هندسه ی کلاس II. نکته: خم ها به نحوی قرار گرفته اند که دو خط آبی، در ورای فاصله ی بین براکتی یکدیگر را قطع کنند.
تصویر 28-4 Off-centered “V” bend ، هندسه ی کلاس III. نکته: “V” bend به یکی از براکت ها، بسیار نزدیک است.
تصویر 29-4 Off-centered “V” bend ، هندسه ی کلاس IV. (*علامت منفی به این معنی است که براکت A در جهت مخالف براکت B، قرار گرفته است.) نکته: خم در یک سوم فاصله ی بین براکتی قرار گرفته است. هیچ گشتاوری در براکت A وجود ندارد.
تصویر 30-4 Off-centered “V” bend ، هندسه ی کلاس V. (*علامت منفی به این معنی است که براکت A در جهت مخالف براکت B، قرار گرفته است، و گشتاور ساعتگرد دارد.) نکته: این جا، خم به نحوی قرار گرفته است که D/3 < DB < D/2. DB فاصله ی بین “V” bend و براکت B است.
تصویر 31-4 Centered “V” bend ، هندسه ی کلاس VI. (*علامت منفی به این معنی است که براکت A در جهت مخالف براکت B، قرار گرفته است، و گشتاور ساعتگرد دارد.) نکته: این جا، خم در وسط فاصله ی بین براکتی قرار دارد. هیچ نیروی عمودی وجود ندارد.
خلاصه
در این فصل تاکیدی قوی بر روی مفاهیم پایه ی اصول مکانیک دخیل در حرکت دندان قرار دادیم. جلوتر در این کتاب کاربرد بالینی این اصول را خواهیم دید. باور ما بر آن است که با باز کردن مکانیک های پایه حرکت دندانی و ادغام آنها با پیشرفت های جدید، قادر به کاراتر کردن حرکت دندانی به همراه حداقل اثرات سوء هستیم. کلنیسین هایی که اوصول حرکت دندانی را درک می کنند کنترل بهتری روی مکانیک های درمانشان و کارایی بیشتری در حرکت دندان دارند.
دانلود فصل چهارم اصول زیبایی و بیومکانیک در ارتودنسی انتشارات آرتین طب