
دانلود در انتهای فصل
روش معمول در ارتودنسی برای تصحیح ناهنجای اندازه دندان نسبت به فکین و مشکلات اسکلتالی در درآوردن دندان میباشد. قبل از درآوردن دندان چند فاکتور را باید مد نظر قرار داد. برخی از مهمتین این فاکتورها شامل موارد زیر است.
شدت کرودینگ
الگوی رشد عمودی صورت
انحراف خط میانی صورت
رابطه بین لب و دندان انسیزور
انکوریج
یکی از مهمتین مراحل پس از درآوردن دندان بستن فضای ایجاد شده است. روش مورد نیاز برای بستن فضا با توجه به تشخیص دقیق و طرح درمان مناسب تعیین میگردد. فارغ از روش استفاده شده سه راه برای بستن فضا وجود دارد.
عقب بردن دندانهای قدامی (حداکثر انکوریج)
جلو آوردن دندانهای خلفی (حداقل انکوریج)
ترکیب هر دو (انکوریج متوسط)
بستن فضا با استفاده از مکانیسمهای مرسوم داخل فکی تقابل بین نیروی وارد شده به قسمت قدامی و خلفی میباشد. براساس قانون سوم نیوتن که برای هر عملی عکس العملی برابر و در جهت مخالف وجود دارد در تمامی نیروهایی که به سمت عقب وارد میشوند یک عکس العمل به سمت جلو وجود دارد. اگر هدف انکوریج ماکزیمم یعنی عقب بردن کامل دندانهای قدامی باشد. تمام یا حداقل 75٪ فضای دندان درآورده شده میبایست توسط عقب بردن دندانهای قدامی پر شود. در این حالت راههای متفاوتی برای بستن فضا وجود دارد.
عقب بردن دندانهای قدامی بدون درگیر کردن دندانهای خلفی با استفاده از دستگاههای خارج دهانی مثل هدگیر J-Hook یا دستگاههای داخل دهانی مثل میکروایمپلنت
عقب بردن دندانهای قدامی بدون درگیر کردن دندانهای خلفی با کمک فک مقابل (مثل CL II Elastic)
خنثی کردن نیروهایی که درجهت قدام به دندانهای خلفی وارد میشوند با استفاده هدگیر به طور تمام وقت
وارد کردن نیروی عقب برنده بر دندانهای قدامی هنگام استفاده از هدگیر
استفاده از مکانیکهای افتراقی
در ماکزیمم انکوریج، همکاری بیمار تاثیر بسیاری در به دست آوردن رابطه مناسب دو فک دارد. در چهار مورد اول (مگر اینکه از میکروایمپلنت به عنوان انکوریج استفاده شود) نتیجه درمان مستقیما به همکاری بیمار بستگی دارد. رسیدن به ماکزیمم انکوریج نسبتا دشوار است مگر اینکه از روشهای افتراقی داخل دهانی استفاده شود. به طور طبیعی برای دست یافتن عکس العمل مناسب نیاز به استفاده از هدگیر یا انکوریجهای کمکی دیگر مثل Transpalatal Arch ،Lingual Stabilizing Arch، کلاس II الاستیک میباشد.
در بیمار ماکزیمم انکوریج زمان درآوردن دندان مهم است زیرا دندانهای خلفی میتوانند به راحتی بعد از درآوردن دندان به سمت جلو حرکت کنند. برای مثال در برخی از بیماران CL II Div I میبایست تا اتمام Leveling صبر کرد و سپس دندان مورد نظر را درآورد و مرحله عقب بردن را انجام داد.
مکانیکهای افتراقی
ماکزیمم انکوریج
برای به دست آوردن ماکزیمم انکوریج نیروهای قدامی وارد شده در دندانهای خلفی میبایست توسط گشتاورهای افتراقی که از اختلاف انکوریج بین دندانهای قدامی و خلفی ایجاد میشوند کاهش یابد یا خنثی گردد.
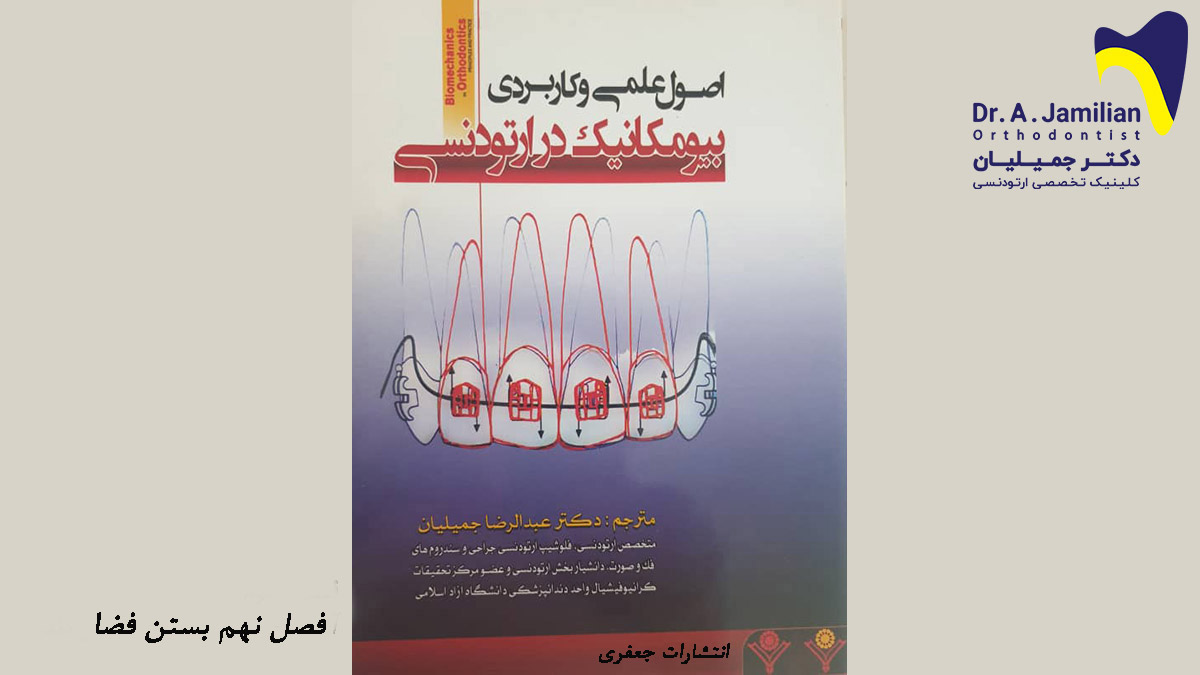
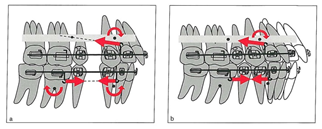
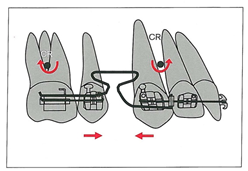
هنگامیکه یک نیرو به دندان وارد میشود دندان Tip میگردد ولی اگر یک جفت نیرو به سیستم وارد شود دندان مقاومت میکند. با افزایش گشتاور نسبت نیرو به گشتاور زیاد میشود. و در نتیجه انکوریج زیاد میشود. بنابراین نیرویی که به دندان وارد میشود دیگر فقط به سطح کلی دندان و تعداد ریشهها بستگی ندارد. گاهی اوقات با توجه به سیستم نیروی وارد شده ممکن است انکوریج یک دندان تک ریشهای بیشتر از دندان چند ریشهای باشد. برای به دست آوردن حداکثر انکوریج در قسمت خلفی نسبت بر روی مولر میبایست آنقدر زیاد باشد که بر حرکات ریشه تاثیر بگذارد. این امر را میتوان توسط افزایش گشتاور در جهت عقربههای ساعت و یا کاهش نیروی قدامی بر روی مولر انجام داد. نسبت و یا بیشتر باعث حرکت ریشه و Tipping دیستالی تاج دندانهای خلفی و مقاومت در برابر نیروی قدامی میشود. از آنجائیکه مقدار نیروی وارد شده به هر قسمت یکسان است برای به دست آوردن حرکت افتراقی دندان مقدار گشتاور در هر سمت میبایست تنظیم گردد. حداقل نسبت میبایست باشد تا بتوان حرکت Tipping کنترل شده به دست آورد. از آنجائیکه از نظر کلینیکی Tipping کنترل شده سریع تر و آسان تر از حرکت ریشه میباشد قبل از جلو آوردن قسمت خلفی میتوان قسمت قدامی را عقب برد (شکل 1-9). با اینکه این مکانیسم موثر است اما در عمل هدگیر میبایست شبها نیز استفاده شود تا شیب مولر کنترل گردد و بردار عمودی نیرو خنثی شود.
نیروهای عمودی که در بخش قدام اینترود کننده و در بخش خلفی اکسترود کننده هستند گشتاورهای افتراقی را متعادل میکنند. مقدار نیروی متعادل کننده به میزان گشتاورها و فاصله بین براکتها بستگی دارد. گشتاورهای زیاد باعث نیروی عمودی بزرگی میشود که به بعد عمودی صورت بخصوص در بیماران دارای رشد عمودی آسیب میرساند. با افزایش فاصله بین دو سگمنت میزان نیروی عمودی کاهش مییابد و بر عکس.
انکوریج متوسط
در انکوریج متوسط فضای ایجاد شده توسط درآوردن دندان میبایست با مقدار مساوی از عقب بردن دندانهای قدامی و جلو آوردن دندانهای خلفی بسته شود. هنگام استفاده از مکانیسمهای افتراقی گشتاورهای وارد به قسمتهای خلقی و قدامی میبایست مساوی و در خلاف جهت یکدیگر باشند. برای کنترل حرکات دندانی نسبت میبایست تقریبا تا باشد. پس از بسته شدن فضای دندان درآورده شده نیاز به گشتاور بیشتر است تا بتوان ریشه را تکان داد.
انکوریج حداقل
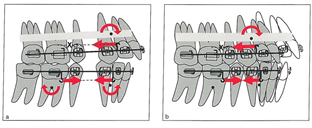
اگر هدف انکوریج حداقل باشد تمام فضای دندان درآورده شده و یا حداقل 75٪ از آن میبایست توسط جلو آوردن دندانهای خلفی بسته شود. این مورد تقریبا بر عکس مکانیسم انکوریج ماکزیمم است. هنگام استفاده از مکانیسم افتراقی جهت دست یافتن به انکوریج حداقل نیروی خلفی واد بر دندانهای قدام میبایست با استفاده از گشتاور افتراقی به حداقل برسد و یا کاملا خنثی شود. برای به دست آوردن انکوریج ماکزیمم در قسمت قدامی نسبت بر روی انسیزورها میبایست آنقدر زیاد باشد که باعث حرکت ریشه شود. این امر را میتوان یا با افزایش گشتاور در جهت عقربههای ساعت و یا کاهش نیروی خلفی وارد بر دندانهای قدامی انجام داد. نسبت برابر با تا باعث حرکت ریشه و Tipping تاج انسیزورها به سمت جلو و در نتیجه ایجاد مقاومت در برابر نیروی خلفی میشود. به منظور به دست آوردن Tipping کنترل شده نسبت در قسمت خلفی میبایست حداقل باشد. از نظر کلینیکی بستن فضا با کمک انکوریج افتراقی کار سادهای نمیباشد. معمولا انکوریج قسمت قدامی نیازمند تقویت است (با استفاده از Face Mask در طول شب) یا دندانهای خلفی می بایست به صورت مجزا جلو آورده شوند زیرا انکوریج انسیزور برای جلو آوردن گروهی دندانها به منقدار کافی محکم نمی باشد (شکل 2-9). همانطور که در فصل 8 در قسمت جلو آوردن مولر توضیح داده شد روش ساده بستن فضای دندان درآورده شده در بیمار حداقل انکوریج حرکت دادن تکی مولرها و پره مولرها توسط Push Coil و گرفتن انکوریج از الاستیک های بین فکی باشد.
استراتژی کلی در بستن فضا
برای بستن فضای دندانهای درآورده شده از 2 استراتژی ساده بیومکانیک میتوان استفاده کرد. که شامل مکانیکهای با اصطکاک و بدون اصطکاک میباشد. در هر دو مکانیک حرکت دندانها میتواند به صورت دو مرحلهای (عقب بردن کانین و جلو آوردن انسیزور) و یا به صورت گروهی باشد. عقب بردن کانین در بیمارانی که دارای کرودینگ قدامی میباشند ضروری است و در این بیماران میبایست از Round Tipping (عقب و جلو آوردن انسیزورها) جلوگیری کرد. به لطف وایرهای عقب برنده انعطاف پذیر، مکانیسم انکوریج میکرو ایمپلنتها و مفاهیم جدید علم بیومکانیک در اکثر بیمارانی که نیاز به درآوردن دندان دارند میتوان دندانها را به صورت گروهی به عقب برد.
بستن فضا در مکانیسم دارای اصطکاک
در مکانیسم دارای اصطکاک انکوریج یک مبحث مهم است زیرا بحش اعظمی از نیروی وارد شده به دندان در اصطکاک بین براکت، Ligature و وایر از بین میرود . بنابراین در بیمارانی که نیاز مبرم به انکوریج دارند استفاده از هدگیر حتی بیشتر از سیستمهای بدون اصطکاک توصیه میشود. در مکانیکهای دارای اصطکاک بستن فضا در 2 مرحله انجام میشود تا از فشار زیادی به دندان انکوریج جلوگیری شود هر چند این تکنیک از عقب بردن یک مرحله ای دندانها (به صورت گروهی) زمان بیشتری نیاز دارد و بیشتر از آنچه توصیه میشود به دندان انکوریج فشار میارود.
شکل 1-9. بستن فضا توسط انکوریج ماکزیمم. نسبت زیاد در بخش خلفی و نسبت کم در بخش قدامی باعث حرکت ریشه مولرها و پره مولرها و Tipping کنترل شده انسیزورها و کانین ها میشود.
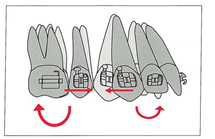
شکل 2-9. (b, a) در مکانیسمهای دارای اصطکاک انکوریج حداقل دندانهای خلفی میبایست به صورت تک تک توسط الاستیکهای بین فکی حرکت کنند تا از عقب بردن نامطلوب دندانهای قدامی جلوگیری شود.
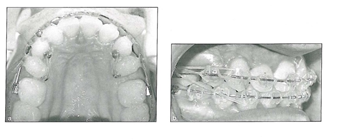
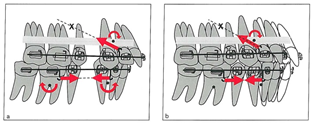
شکل 3-9. در عقب بردن گروهی دندانها در مکانیسم دارای اصطکاک وایر در داخل براکتها و تیوبهای دندانهای خلفی به صورت لغزشی حرکت میکند.
بستن 2 مرحلهای فضا
عقب بردن کانین
در مکانیسمهای دارای اصطکاک کانینها توسط حرکت لغزشی بر روی وایر به عقب برده میشوند. مادامیکه نیروی دائم و به مقدار کافی (200 گرم) باشد حرکت دندان توسط سیکلهای Tipping و Uprighting حاصل میشود (شکل 4-4). فاکتورهای مربوط به اصطکاک مثل مقدار نیرو، زاویه بین وایر و براکت، اندازه وایر، سفتی وایر، جنس وایر و براکت، جنس و سفتی Ligature بر روی حرکت دندانی تاثیر میگذاد. اصولا نیروی مورد نیاز برای غلبه بر اصطکاک با نیروی مورد نیاز برای حرکت دندان برابر است. در یک نیروی ثابت وایری که دارای انعطاف پذیری بیشتری است به مقدار زیادتری نسبت به وایر سفت خم میگردد که این خود باعث Tipping بیشتر میشود. از سوی دیگر همین نتیجه را میتوان توسط وارد کردن نیروی بیشتر به وایر سفت به دست آورد. اما نیروی زیاد باعث Deep Bite به علت اکستروژن انسیزور، از دست دادن انکوریج به علت Binding و دفورمه شدن وایر میگردد (شکل 9-14). مجموعه وایر گرد، سفت با نیروی Light به همراه استفاده از Ligature موثرترین روش برای عقب بردن کانین است. هم چنین برای جلوگیری از Binding و عوارض مربوطه پیشنهاد میگردد که سفتی Ligature دائما تنظیم شود (به فصل 4 رجوع شود).
عقب بردن انسیزور
بعد از عقب بردن کانین ها، انسیزورها به عقب برده میشوند تا فضای باقیمانده بسته شود. عقب بردن انسیزور توسط مکانیسم لغزشی نیازمند انکوریج محکم تری نسبت به عقب بردن کانین می باشد. انکوریج دندانهای خلفی (شامل کانین ها) به تنهایی کافی نمی باشد. در انکوریج متوسط Chain کافی است اما برای انکوریج ماکزیمم نیاز به استفاده از هدگیر و یا الاستیک CLII می باشد.
عقب بردن گروهی دندانها (En masse retraction)
همانند مکانیک های لغزشی عقب بردن گروهی دندانها در سیستم دارای اصطکاک نیازمند انکوریج محکمی می باشد. در این تکنیک در خلال عقب رفتن دندانهای قدامی وایر در داخل براکتها و تیوبهای دندانهای خلفی به صورت لغزشی حرکت می کند (شکل 3-9). تقابل بین وایر و تیوب می تواند باعث ایجاد اصطکاک زیادی شود و در نتیجه ممکن است Binding و از دست رفتن انکوریج صورت گیرد. به منظور جلوگیری از اصطکاک خصوصاً در خم Third Order لبه های وایر مربع مستطیل می بایست توسط تیغه الماس گرد شوند و همچنین توسط لاستیک پرداخت صیقلی شود (به شکل 7-8 رجوع شود) برای داشتن حرکت لغزشی موثر باید 002/0 اینچ فضای آزاد بین وایر و شیار براکت وجود داشته باشد. بنابراین استفاده از وایر 022/0× 012/0 اینچ در شیار 018/0 اینچ مناسب است. در عمل برای جلوگیری از اصطکاک قطورترین وایر Leveling را می توان یک تا دو ماه تا زمانی که Torque مناسب برای مولر و پره مولر به دست آید نگه داشت. اگر وایر مربع مستطیل هم قطر با لبه های گرد شده داخل براکت قرار گیرد خم Third Order حذف می شود اما این امر خود باعث حرکت رو به جلوی دندان های خلفی می شود. در بیمارانی که نیاز مبرم به انکوریج دارند عقب بردن دندان را می توان توسط هدگیر همراه با الاستیک های بین فکی و یا فقط با الاستیک های بین فکی انجام داد. به علت اصطکاک حرکت افتراقی دندان را نمی توان در مکانیسم دارای اصطکاک حرکت گروهی دندانها به کار برد ولی می توان آن را در بیمارن انکوریج حداقل یا متوسط استفاده کرد. قراردادن Coil Spring نیکل تیتانیوم بین مولرها و کانین ها نیروی کافی و حرکت دندانی را فراهم می سازد. الاستیک های CLII انکوریج کافی برای دست یافتن به رابطه CLI مولر را فراهم می سازد.
عقب بردن گروهی دندان ها توسط مکانیسم میکروایمپلنت
عقب بردن گروهی دندانها که یکی از دشوارترین روشها توسط تکنیک های مرسوم می باشد را می توان به طور موثری توسط مکانیسم انکوریج میکروایمپلنت انجام داد. با استفاده از روش های سنتی عقب بردن گروهی را تنها توسط انکوریج خارج دهانی می توان انجام داد که به مقدار زیادی به همکاری بیمار وابسته است.
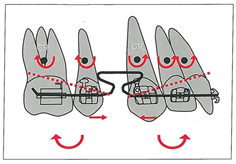
در عقب بردن گروهی دندانها با استفاده از انکوریج میکروایمپلنت محل قرار دادن TAD با توجه به نیاز بیمار مشخص شود. Sung و همکاران با توجه به جهت وارد شدن نیرو سه فاصله تحت عنوان کم، متوسط، زیاد را مشخص کردند. پس از قراردادن TAD بین ریشه پره مولر دوم و مولر اول فک بالا اگر فاصله TAD از وایر بین 8 تا 10 میلیمتر باشد ”فاصله متوسط“ بیش از 10 میلیمتر ” فاصله زیاد “ و کمتر از 8 میلیمتر ”فاصله کم“ تلقی میشود. در TAD ”فاصله متوسط“ وارد شدن نیروی Coil Spring به هوک 6 میلیمتری در بین لترال و کانین فک بالا باعث حرکت انتقالی دندانهای قدامی می شود (شکل 4-9). اگر همین نیرو در TAD ”فاصله کم“ وارد شود باعث چرخش دندانهای فک بالا در جهت عقربه های ساعت و اکسترود شدن آنها می شود که می توان در تصحیح Open Bite قدامی مفید باشد (شکل 5-9). اما اگر میکروایمپلنت در ”فاصله زیاد“ باشد دندانهای قدام اینترود می شوند که در تصحیح دیپ بایت مناسب است.
شکل 4-9. نیروی وارد شده به هوک و TAD در فاصله 8 تا 10 میلیمتری از وایر (a) باعث حرکت دندانهای قدامی به شکل انتقالی می گردد (b).
شکل 5-9. نیروی وارد شده به هوک و TAD در فاصله کمتر از 8 میلیمتری از وایر (a) باعث حرکت گروهی دندانهای قدامی و چرخش در جهت عقربه های ساعت می گردد که به تصحیح Open Bite کمک می کند (b).
شکل 6-9. نیروی وارد شده به هوک و TAD در فاصله بیش از 10 میلیمتری از وایر (a) باعث حرکت گروهی دندان های قدامی و چرخش در جهت عقربه های ساعت می گردد که به تصحیح دیپ بایت کمک می کند (b).
بستن فضا در مکانیک های بدون اصطکاک
بستن فضا در مکانیسم بدون اصطکاک را می توان با وایر Continuous دارای Loop یا وایر Segmented انجام داد.
وایر Continuous
در تکنیک وایر Continuous از Closing Loop استفاده میشود. فارغ از تکنیک مورد استفاده فنریت Closing Loop به 3 فاکتور وابسته است که شامل اندازه وایر، شکل Loop و فاصله بین نقاط اتصال (فاصله بین براکتی) می باشد. روش های افزایش کارآیی Loop شامل موارد ذیل است.
استفاده از وایر بیشتر در ساخت Loop (مانند اضافه کردن Helix)
استفاده از وایر با قطر کمتر
افزایش فاصله بین براکتی
تغییر شکل Loop
نسبت در یک Loop با بیشتر شدن مقدار وایر در ناحیه لثه ای بیشتر می شود. هر چه فاصله بین براکتی بیشتر باشد دامنه کاری Loop بیشتر می شود. زیاد کردن مقدار وایر با افزایش قطر و استفاده از Loop های ساده تر با کاهش قطر وایر نتایج یکسانی به همراه دارد. انتخاب مناسب مجموعه مورد نیاز جهت درمان به تناسب ریسک و فواید حاصل از آن وابسته است. قرار دادن وایر بیشتر در Loop دامنه کاری و نسبت را افزایش می دهد اما می تواند برای بیمار ناخوشایند باشد. از سوی دیگر Loop های ساده (مثل Loop های عمودی) برای بیمار راحت تر است ولی نسبت به مقدار قابل توجهی در آنها کمتر است.
مقدار فعال کردن پیشنهادی در Loop عمودی مثل Bull، Sandusky یا دلتا حدود یک میلیمتر در ماه می باشد. فعال کردن یک میلیمتر Bull Loop در وایر استینلس استیل 025/0×018/0 اینچ حدود 500 گروم نیرو وارد می کند. بلافاصله پس از فعال شدن پایه های Loop بسته می شوند که از نظر کلینیکی مناسب است. Proffit پیشنهاد می کند پس از حرکت دادن دندان به مقدار لازم حرکت دندانی متوقف شود تا اگر بیمار به موقع جهت درمان حاضر نشود از عوارض ناخواسته مکانیکی جلوگیری شود. نسبت توسط Loop را می توان با قرار دادن خم Gable در پایه ها افزایش داد (شکل 7-9). این خم ها پس از بسته شدن فضای دندان درآورده شده گشتاورهایی موازی ریشه تولید می کنند. زاویه این خم ها به اندازه یا سفتی وایر بستگی دارد و در وایر استینلس استیل 022/0×016/0 اینچ 30 تا 40 درجه، در وایر استینلس استیل 025/0×017/0 اینچ 20 تا 30 درجه و دروایر تیتانیوم مولیبون 025/0×017/0 بیش از 40 درجه می باشد. زاویه خم همچنین به نوع عقب بردن دندان و نیاز بیمار به انکوریج بستگی دارد اگر هدف عقب بردن انسیزورها با حرکت ریشه باشد خم Gable را باید افزایش داد. در صورت لزوم با قراردادن Palatal Root Torque در وایر می توان گشتاور قدامی را زیاد کرد.
خم Gable تقریباً شبیه خم V است بنابراین موقعیت آن بین سگمنتها بر مکانیسم حرکت دندان اثر می گذارد (به فصل سوم رجوع شود). حرکت دادن Loop به مقدار یک تا دو میلیمتر به یک جهت باعث ایجاد کشتاور افتراقی می شود در بیمار با انکوریج متوسط Loop می باست در وسط سگمنت ها قرار گیرد تا کشتاورهای برابر و در خلاف جهت یکدیگر به دست آید. در بیمار ماکزیمم انکوریج قراردادن خلفی Loop کشتاور بیشتری ایجاد می کند هر چند این امر توسط فاصله بین براکتی در محل دندان درآورده شده محدود می شود. با Cinch کردن وایر در پشت تیوب مولر Loop به عقب حرکت می کند بنابراین در بیماری که پره مولر اولش خارج شده است Loop می بایست در ابتدا جلوتر قرارگیرد تا با براکت پره مولر دوم تداخلی نداشته باشد. همانطور که Loop به عقب حرکت می کند کشتاور خلفی افزایش می یابد.
هنگامی که Loop بسیار قدامی تر قرار گیرد و به دندان های قدامی Palatal Root Torque اعمال گردد کشتاورهای قدامی بیشتر از خلفی می شوند نیروی اکسترود کننده بر روی دندان های انسیزور و نیروی اینترود کننده بر روی دندان های مولر این اختلاف کشتاور را به تعادل می رساند. استفاده از الاستیک CLII برای تقویت انکوریج می تواند باعث اکسترود شدن انسیزورها و بدتر شدن نتایج درمان شود. اگر نیاز به انکوریج مبرم است می توان از هدگیر با Transpalatal Arch و یا بدون آن استفاده کرد.
مکانیک وایر Segmented
در تکنیک وایر Segmented بخش های خلفی و قدامی توسط وایرهای مربع مستطیل و Transpalatal Arch در واقع به ”2 دندان بزرگ“ تبدیل می شوند. بنابراین مکانیک های بکار برده شده در این تکنیک تقابل بین قدرت کشش دو دندان نسبت به یکدیگر می باشد. بستن فضا با استفاده از وایر TMA دارای T-loop به اندازه 025/0×017/0 اینچ در تیوب مولر و با تیوبهای عمودی Crimpable بین براکت های لترال و کانین انجام می شود.
سگمانها حول مرکز چرخش خود حرکت دورانی دارند (شکل 8-9). مقدار فعاال کردن Loop و محل آن در بین 2 اتصال طراحی بیومکانیکی آن را مشخص می کند. Nanda و Kuhlberg و Burstone پیشنهاد کردند که T Loop براساس نیازهای بیمار به مقدار 4 تا 6 میلیمتر فعال گردد تا حرکت کنترل شده دندانی فراهم گردد. هنگامی که T Loop (یا خم V) در نقطه میانی 2 اتصال باشد کشتاوری برابر و در خلاف جهت یکدیگر در هر سمت ایجاد می کند. اما هنگامی که به یک سمت نزدیک تر شود در آن سمت کشتاور بیشتری تولید می کند. برخلاف مکانیک وایر Continuous ، فاصله زیاد بین اتصالات، قرار دادن خلفی یا قدامی Loop (خم V) را با توجه به نیاز انکوریج بیمار ممکن می سازد.
در بیماران با انکوریج ماکزیمم فضاهای دندان های در آورده شده اصولاً توسط عقب بردن دندان های قدامی بدون حرکت به سمت جلوی دندان های خلفی انجام می شود. استفاده از مکانیک های افتراقی به بهتر شدن انکوریج خلفی کمک می کند اما معمولاً برای عقب بردن گروهی دندان ها کافی نمی باشد. بنابراین برای تقویت انکوریج معمولاً نیاز به هدگیر یا الاستیک CLII می باشد (شکل 9-9).
مکانیک وایر Segmented به طور موثری بخش قدامی را در بیماران انکوریج ماکزیمم به عقب می برد زیرا هم وایر TMA و هم طراحی T-loop در صورت نیاز نسبت زیادی از را فراهم می سازد. در بیماران انکوریج ماکزیمم هنگامی که کشتاور خلفی بیش از کشتاور قدامی باشد انکوریج افتراقی به دست می آید. در انکوریج افتراقی هدف حرکت ریشه مولرها و Tipping انسیزورها می باشد. حرکت ریشه قسمت خلفی را می توان به 2 روش بدست آورد که این 2 روش شامل افزایش خم بر روی پایه خلفی T Loop (افزایش کشتاور خلفی) و قراردادن T Loop در نزدیکی اتصال خلفی می باشد.
نسبت برابر تا باعث حرکت ریشه دندانهای خلفی می شود. کشتاور تاج مولر را به عقب Tip می کند بنابراین در برابر نیروهای قدامی مقاومت ایجاد می شود. این اتفاق در حالی روی می دهد که بخش قدامی توسط Tipping کنترل شده با برابر با تا به عقب برده می شود.
گشتاورهای افتراقی باعث نیروهای متعادل کننده عمودی می شوند که این نیروها در قسمت قدامی اینترود کننده و در قسمت خلفی اکسترود کننده می باشد. دربیماران دارای رشد عمودی از اکسترود شدن مولر می بایست جلوگیری شود تا از چرخش فک پایین اجتناب گردد. برای کنترل اکستروژن و شیب مولرها و تصحیح Cant قسمت خلفی ممکن است نیاز به استفاده از هدگیر High Pull شود.
در بیماران با انکوریج متوسط فضای دندان های درآورده شده توسط حرکت مساوی قسمت های خلفی و قدامی بسته می شود. اگر Loop در بین 2 قسمت قرار گیرد کشتاور مساوی در خلاف جهت یکدیگر ایجاد می شود پس هیچگونه نیروی متعادل کننده ای در سیستم وجود ندارد. Nanda و Kuhlberg برای به دست آوردن نسبت برابر در هر سمت، فعال کردن وایر TMA داری T Loop تا 6 میلیمتر را پیشنهاد کردند. همان طور که Loop غیر فعال می شود نسبت تا مقدار افزایش می یابد که باعث سه مرحله حرکت دندانی شامل Tipping، حرکت انتقالی و حرکت ریشه می شود. Proffit معتقد است مکانیک وایر Segmented کاملاً اطمینان بخش نمی باشد زیرا اگر Loop عقب برنده از شکل طبیعی خارج شود و یا به نادرستی فعال شود فرم آرچ و روابط عمودی دیگر قابل کنترل نیستند. Nanda و Kuhlberg پیشنهاد نمودند که بر بستن فضا دائماً نظارت شود و هنگامی که پلان های اکلوزال موازی هم شدند فنر مجدداً فعال شود.
در بیماران انکوریج حداقل بستن فضا توسط حرکت بخش خلفی به جلو صورت می گیرد جلوآوردن مولرها و پره مولرها با استفاده از مکانیک افتراقی نسبتاً دشوار است زیرا انکوریج قدامی به مقدار کافی محکم نمی باشد و جلوگیری از عوارض جانبی غیر قابل اجتناب است.
برای بدست آوردن گشتاور افتراقی، گشتاور بخش قدامی می بایست افزایش یابد و Loop نزدیک تر به بخش قدامی قرارگیرد. گشتاورهای افتراقی نیروهای متعادل کننده عمودی ایجاد می کنند که این نیروها در بخش قدامی اکسترود کننده و در بخش خلفی اینترود کننده می باشد بیشترین اثر ناخواسته آن دیپ بایت به علت اکسترود شدن و عقب رفتن انسیزورها می باشد. در دندان های فک بالا استفاده از Face Mask به همراه الاستیک های CLII نیروی قدامی بر روی مولرها را افزایش می دهد. در دندان های فک پایین ممکن است برای تقویت انکوریج قدامی نیاز به الاستیک های CLII شود. به منظور کاهش عوارض ناخواسته T Loop می بایست 1 تا 2 میلیمتر فعال شود. در بیماران انکوریج حداقل درآوردن پره مولر دوم به بدست آوردن انکوریج بهتر در قسمت قدامی کمک می کند. اگر در هر فک نیاز به انکوریج حداقل باشد به یک Face Mask در فک بالا همراه با الاستیک های CLII نیاز خواهد بود تا انکوریج قدامی تقویت شود و از عقب رفتن انسیزورهای فک بالا و پایین جلوگیری شود.
شکل 7-9. هنگام بستن فضا با استفاده از مکانیک وایر Continuous یک خم Gable می بایست در پایه های قدامی و خلفی Loop ایجاد شود تا حرکت ریشه موثر شود. از آنجائیکه وایر از داخل براکتها عبور می کند دندانها حول مرکز چرخش (CR) خود می چرخند.
شکل 8-9. در بستن فضا توسط تکنیک Segmented قسمت های قدامی و خلفی به عنوان 2 دندان بزرگ تلقی می شود که حول مرکز چرخش خود CR می چرخند.
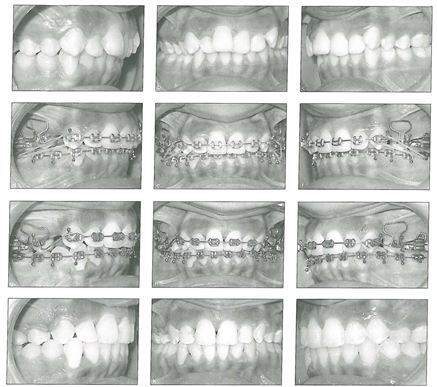
شکل 9-9. بستن فضا توسط حرکت گروهی دندانها با استفاده از مکانیک Segmented با کمک وایر TMA دارای T Loop با اندازه 022/0×016/0 اینچ و الاستیک های CLII. (a تا c) قبل از درمان. (d تا f) شروع عقب بردن با استفاده از T Loop و الاستیک های CLII. (g تا I) سه ماه پس از شروع درمان. به بهبود شیب کانین ها با وجود نیروی عقب برنده به علت نسبت زیاد تولید شده توسط T Loop توجه شود. (J تا L) اتمام درمان پس از 5 ماه عقب بردن دندان ها.
دانلود فصل نهم از کتاب اصول علمی و کاربردی بیومکانیک در ارتودنسی (بستن فضا) انتشارات جعفری




سلام وقت بخیر
من حدودا دوسال هست ارتودنسی کردم دو دندون شماره 4 فک بالا کشیدم ولی بعد حدودا از یکی از فضا بسته شد و اون یکی فضا بسته نشده و چند ماهی هست تغییری در بسته شدنش ندیدم به نظرتون ممکنه این فضا بسته نشه ؟
باسلام. بسته نشدن فضای دندان پس از کشیدن دندان های شماره ۴ در فک بالا، می تواند به چند دلیل مختلف اتفاق بیفتد. حرکت دندان ها، در برخی موارد، دندان های مجاور ممکن است به سمت فضای خالی حرکت کنند و این می تواند باعث بسته شدن فضای خالی شود. اگر یکی از دندان ها این کار را کرده است و دیگری نه، ممکن است دلیل این امر، عدم وجود نیروی کافی برای حرکت دندان ها باشد. اگر دندان ها به اندازه کافی تحت فشار قرار نگیرند یا نیروی لازم برای حرکت دندان ها وجود نداشته باشد، فضای خالی ممکن است بسته نشود. این ممکن است به دلیل طراحی نادرست دستگاه ارتودنسی یا عدم تنظیم به موقع آن باشد. در برخی موارد، ممکن است مشکلات ساختاری مانند ناهنجاری های فکی یا دندانی وجود داشته باشد که بر روی بسته شدن فضای خالی تأثیر بگذارد. بهترین کار این است که به ارتودنتیست خود مراجعه کنید و این موضوع را با او در میان بگذارید. او می تواند با معاینه بالینی و بررسی رادیوگرافی ها، وضعیت دندان ها و فضای خالی را ارزیابی کند و پیشنهادات لازم را ارائه دهد.