این فصل سیسم نیروی ایجاد شده توسط مکانیسمهای Straight Wire و وایرهایی را که در آنها Bend داده میشود، توضیح میدهد. در بیماران دارای کرودینگ به منظور مرتب کردن دندانهایی که در موقعیتهای مختلف قرار دارند Straight Wire در داخل براکت قرار داده میشود. دندان در پاسخ به الاستیسیتی وایر حرکت میکند. در نتیجه سیستم نیرویی توسط یک سیم و چند براکت ایجاد میشود. این سیستم نیرو به تعادل سکون خواهد رسید. اولین شرط برای رسیدن به همچین تعادلی این است که برآیند نیروها و گشتاورهای سیستم صفر گردد. ارزیابی نیرو و گشتاور در یک قوس دندانی به علت میزان انکوریجهای متفاوت در هر دندان و به علت اینکه هر دندان عرض متفاوتی از براکت و یا تیوب دارد و به علت اینکه براکتها و تیوبها در زوایای مختلف قرار دارند بسیار پیچیده است. این فصل مکانیک ایجاد شده بر روی دو دندان را همانگونه که توسط Burstone و Koenig پیشنهاد شده توضیح میدهد.
سیستم نیروی در حال سکون
اگر فاصله بین دو اتچمنت مشخص گردد و اگر نیروی وارد شده بر روی براکت توسط نیروسنج اندازه گیری شود موقعیت نهایی دندان قابل پیش بینی است. به عبارت دیگر سیستم نیرو گشتاور به منظور حرکت دندان میتواند کنترل گردد. این سیستم به نام سیستم نیروی در حال سکون نامیده میشود.
برای مثال جدول a1-3 دندان کانین و پره مولر را با میزان انکوریج مساوی نشان میدهد. فرض نمایید یک سیم Straight با مقطع گرد قابل انعطاف در براکت کانین و پره مولر قرار داده شود. اگر فاصله بین 2 براکت 7 میلیمتر باشد و نیروی مورد نیاز به منظور فعال کردن وایر برای حرکت کانین 100 گرم باشد یک گشتاور در خلاف جهت عقربههای ساعت به میزان 700 گرم بر میلیمتر بر دندان پره مولر وارد میشود. از آنجائیکه میزان انکوریجها برابر است مرکز مقاومت در این سیستم نیرو در وسط آنها قرار میگیرد. برای رسیدن به شرایط تعادل در حال سکون جمع جبری همه نیروها و گشتاورهای اعمال شده بر سیستم بایستی صفر باشد. گشتاور در خلاف جهت عقربههای ساعت در پره مولر باید با گشتاور در جهت عقربههای ساعت در تعادل باشد که نیروی عمودی مساوی و در خلاف جهت بر روی هر دو دندان اعمال میگردد. بنابراین هنگامیکه وایر در براکت کانین قرار میگیرد گشتاوری در خلاف جهت عقربه ساعت به میزان 700 گرم بر میلیمتر مربع بر روی دندان پره مولر ایجاد میشود و باعث ایجاد نیروی عمودی 100 گرم بر روی هر دو دندان میشود. وقتی سیم به طور کلی غیر فعال میگردد و دندان به موقعیت تعادل میرسد دندان پره مولر به سمت مزیال Tip و هم چنین اینترود میگردد در حالیکه دندان کانین اکسترود میگردد. به هر حال دندان کانین نمیتواند به سطح اکلوزال برسد. (شکل b 1-3)
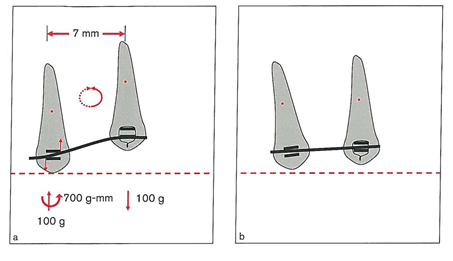
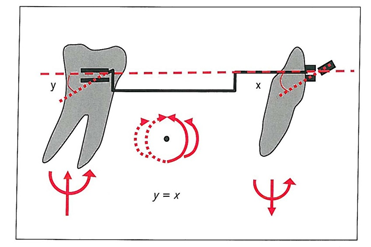
شکل 1-3. دو دندان با انکوریج مساوی شامل یک پره مولر و یک دندان کانین که در موقعیت بالاتر از سطح اکلوزل قرار دارد. در شکل a هنگامیکه قسمتی از سیم در براکت پره مولر قرار میگیرد و با قرار دادن وایر در داخل شیار براکت کانین فعال میگردد. از طریق دو دندان و یک وایر در بین آنها سیستم نیرویی ایجاد میگردد. این سیستم توسط نیروی اینتروژن (Upward Balancing) و توسط گشتاور در خلاف جهت عقربههای ساعت بر روی دندان پره مولر (Downward Balancing) و به همین ترتیب توسط نیروی اکستروژن (Downward Balancing) بر روی دندان کانین به حالت تعادل در حال سکون میرسند. (b) توجه نمائید که دندان کانین نمیتواند به سطح اکلوزال برسد زیرا مقداری نیروی intrusion بر روی دندان پره مولر وجود دارد و مقدار انکوریج برای هر دو دندان یکسان است.
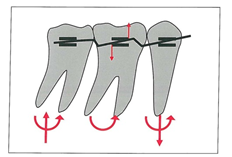
اگر در مثال قبلی دندان پره مولر با دندان مولر جایگزین شود دندان مولر نسبت به دندان کانین انکوریج بیشتری دارد (شکل a2-3). و بدین ترتیب سیستم نیرو متفاوت خواهد بود. در این شرایط گشتاوری در جهت خلاف عقربههای ساعت برابر با 700 گرم بر میلیمتر روی دندان مولر اعمال میشود. این گشتاور با نیروی اینتروژن 125 گرم در روی مولر و نیروی اکستروژن 75 گرم در روی کانین در حال تعادل میباشد. این امر باعث تغییر سیستم نیرو در 2 مسیر میشود. اولا براساس قوانین اهرم همانگونه که مرکز مقاومت سیستم به سمت دندان مولر نزدیک میشود میزان نیرو در روی مولر بیشتر از کانین است. ثانیاً از نقطه نظر کلینیکی از آنجائیکه انکوریج دندان مولر بیشتر از انکوریج دندان کانین است دندان مولر حرکت نمیکند. از سوی دیگر اگرچه مقدار نیرو کم است ولی اکستروژن دندان کانین به راحتی انجام میشود. (شکل b2-3)
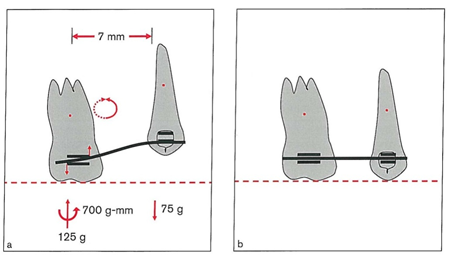
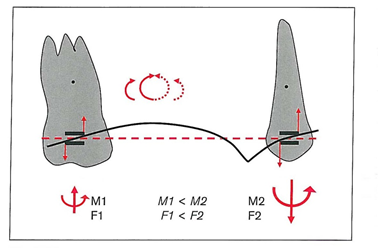
شکل 2-3. دو دندان با مقادیر متفاوت انکوریج. همانند شکل a اگر یک وایر Segmented در تیوب مولر اول قرار گیرد و کمی به سمت بالا خم شود و بر روی دندان کانین یک تماس نقطهای همانند شکل 1-3 داشته باشد در آن موقع یک گشتاور در جهت مخالف عقربههای ساعت بر روی مولر اعمال میشود. این گشتاور توسط نیروهای بالانس کننده عمودی که منجر به چرخش سیستم در جهت عقربههای ساعت میشود به حالت تعادل میرسد. این نیروهای بالانس کننده عمودی به صورت نیروی اینتروژن بر روی مولر و نیروی اکستروژن بر روی دندان کانین اعمال میگردد. در شکل b مشاهده میشود که دندان کانین به علت وجود انکوریج بیشتری که بر روی دندان مولر است به سطح اکلوزال میرسد. به علت اینکه انکوریج دندان مولر به اندازهای است که در مقابل هر حرکتی مقاومت کند. بنابراین دندان مولر دچار Tipping نمیشود.
ارتباط بین دندانهایی که دارای کرودینگ هستند پیچیده است. بنابراین پیش بینی حرکت دندانی مشکل است. در دندانهای شلوغ موقعیت قرار دادن براکتها با توجه به شیب محوری دندانها بسیار تغییر میکند. مثالهای قبلی رابطه قدامی خلفی دو دندان در یک پلان را توصیف مینماید و راجع به چرخش یا Angulation براکت توضیح نمیدهد. وقتی یک وایر در داخل 2 براکت درگیر میشود دندان را در سه پلان فضایی قدامی خلفی، عمودی و عرضی میچرخاند.
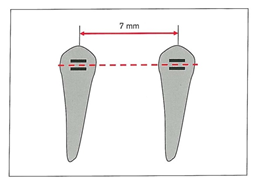
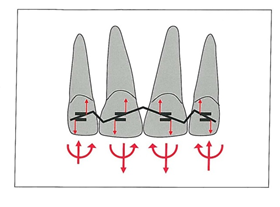
شکل 3-3. وقتی یک وایر در براکتهای 2 دندان که میزان انکوریج آنها مثل هم است و در ضمن در یک پلان مساوی قرار دارند واقع میشوند، به دلیل اینکه سیم هیچ نیرویی به دندانها اعمال نمیکند، دندانهای حرکتی نخواهند داشت.
گروهبندی هندسی Burstone
همانگونه که مثالهای زیرین نشان میدهد زوایای مختلف براکت نسبت به دندان روی حرکت دندان اثر میگذارد. Burstone و Koenig نسبتهای بین دو دندان را به شش گروه تقسیم کردند (به منظور ساده شدن فقط سیستمهای غیر فعال شدن نیرو نشان داده شده است). به عنوان نقطه شروع شکل 3-3 وایر Straight به اندازه 0.016 اینچ در 2 براکت با عرض مساوی که در یک پلان یکسان قرار دارد را نشان میدهد. فاصله بین 2 براکت 7 میلیمتر است.
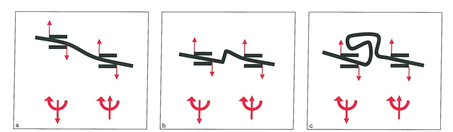
با فرض اینکه انکوریج 2 دندان مساوی باشد وسیم فعال نباشد هیچ گشتاوری اعمال نمیشود. در شکل 4-3 همه شش گروه که توسط Burstone و Koenig پیشنهاد شده است با تغییر براکت سمت چپ و عدم تغییر براکت سمت راست نشان داده شده است. شکل 5-3 شکل وایر درتمام شش گروه وقتی در داخل براکت قرار میگیرد را نشان میدهد.
گروه هندسی یک
در گروه یک نسبت بین زوایای براکتها مینی مساوی یک است. بنابراین زوایای براکتها برابر و راستای قرار گیری آنها نیز یکسان است. از آنجائیکه زوایای بین وایر و براکت در هر دو دندان یکسان است گشتاوری در جهت عقربههای ساعت برابر 860/1 گرم بر میلیمتر در هر براکت اتفاق میافتد. بنابراین گشاورها برابر هستند و رابطه بین گشتاور ها برابر یک است. برای رسیدن به موقعیت بالانس در حال سکون مجموع همه گشتاورها و نیروهایی که در سیستم اعمال میشود باید صفر باشد. در این سیستم گشتاور در جهت عقربههای ساعت (به میزان 860/1 گرم بر میلیمتر) در هر دو براکت اعمال میگردد. بنابراین مجموع گشتاور در جهت عقربههای ساعت 720/3 گرم بر میلیمتر میگردد برای اینکه سیستم به حالت بالانس برسد نیروی برابر 4/531 گرم در جهت فوقانی بر روی براکت سمت راست و در جهت تحتانی بر روی براکت سمت چپ ایجاد میشود. براساس فرمول F × L سیستم با گشتاور در جهت خلاف عقربههای ساعت به میزان 4/531 ×7 = 8/3719 گرم بر میلیمتر به حالت تعادل میرسد. از نظر کلینیکی وقتی همچین سیستمی از نیروها به حالت تعادل در حال سکون میرسد هر دو دندان دچار چرخش در جهت عقربههای ساعت میشوند و دندان سمت راست اکسترود و دندان سمت چپ اینترود میگردد.
گروه هندسی 2
در گروه دو نسبت بین زوایای براکتها بین برابر 5/0 است و نسبت بین گشتاور ها بین برابر 8/0 است. از آنجائیکه زوایای براکت سمت راست تغییر نمیکند میزان نیرو و جهت گشتاور اعمال شده در این براکت به همان مقدار قبلی (یعنی برابر 860/1 گرم بر میلیمتر در جهت عقربههای ساعت) باقی میماند. بخاطر اینکه زاویه بین سیم و براکت در براکت سمت چپ کمتر از سمت دیگر است جهت گشتاور همانند جهت گشتاور قبلی است ولی مقدار آن به میزان 488/1 گرم بر میلیمتر کاهش مییابد. مجموع گشتاورها در جهت عقربههای ساعت برابر 348/3 گرم بر میلیمتر است که روی سیستم نیروها اثر میگذارد. برای به تعادل رسیدن در این سیستم میزان نیروی بالانس کننده بر هر براکت باید گرم باشد (اگر چه بعضی از محققین مقدار نیروی 4/477 گرم را نیروی مناسبی میدانند). از آنجائیکه مقدار انکوریج دندانها برابر است میزان نیروی بالانس کننده در هر دو سمت برابر میباشد. این سیستم با چرخش در جهت عقربههای ساعت در هر دو سمت با اکسترود شدن دندان سمت راست و اینترود شدن دندان سمت چپ به حالت تعادل میرسد.
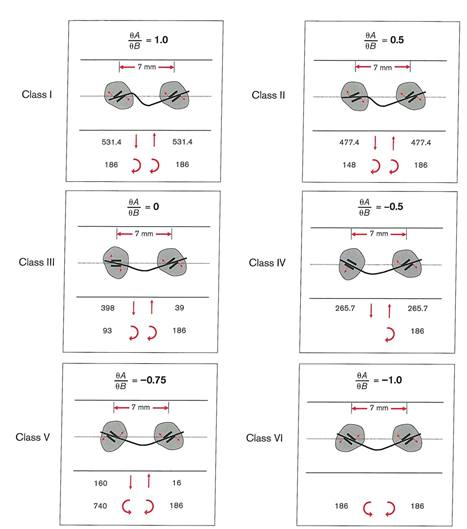
شکل 4-3. شش گروه هندسی عنوان شده براساس نظریه Burstone و Koenig. رابطه نسبی به محل قرار گرفتن براکتهای سمت چپ (A) و سمت راست (B) در ردیف بالا نشان داده شده است. نسبت بین گشتاورهای سمت چپ و راست در ردیف وسط نشان داده شده است. جهت و بزرگی گشتاورها و نیروهای بین براکتهای چپ و راست در ردیف پایین نشان داده شده است. به عنوان مثال همانطور که در گروه پنج مشاهده میشود زاویه دار بودن وایر نسبت به براکت سمت راست گشتاوری معادل 1860 گرم بر میلیمتر ایجاد میکند در حالیکه ورود بدون زاویه به براکت سمت چپ گشتاوری ایجاد نمیکند.
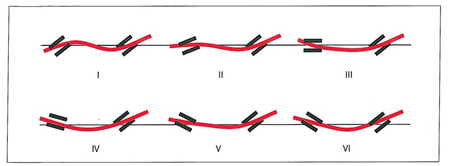
شکل 5-3. در این تصویر شکل وایر بعد از قرار گرفتن در براکت در 6 گروه هندسی که در شکل 4-3 توضیح داده شده است، مشاهده میگردد. اگر خط فرضی بین 2 براکت در نظر گرفته شود، همانگونه که در شکل مشاهده میشود در گروه یک و دو وایر این خط را قطع میکند. در حالیکه در چهار گروه دیگر وایر از زیر این خط فرضی میگذرد. در گروه شش عبور وایر از خط فرضی کاملا متقارن است. این تقارن باعث میشود وایر زاویه یکسانی در هر دو براکت داشته باشد که باعث ایجاد گشتاوری برابر و در خلاف جهت یکدیگر میشود.
گروه هندسی سه
در گروه سه نسبت بین زوایای براکت برابر صفر و نسبت بین گشتاورها برابر 5/0 میباشد. از آنجائیکه در این گروه گشتاور براکت راست و چپ در جهت حرکت عقربههای ساعت میباشد، بزرگی گشتاور در براکت سمت راست 1860 گرم بر میلیمتر است و به علت زاویه کمتر براکت سمت چپ گشتاور آن برابر 930 گرم بر میلیمتر است و نتایجی مشابه گروه دو به دست خواهد آمد. برای به تعادل رسیدن گشتاور کلی سیستم که معادل 2790 گرم بر میلیمتر است نیروی معادل 398 گرم لازم است تا سیستم را بر خلاف جهت عقربههای ساعت بچرخاند. هنگامیکه سیستم به حالت تعادل میرسد هر دو دندان در جهت عقربههای ساعت میچرخند. دندان راست اکسترود و دندان چپ اینترود میشود.
گروه هندسی چهار
در گروه چهار نسبت بین زوایای براکت برابر 5/0- و نسبت بین گشتاورها برابر صفر است. توجه نمائید که هیچ گشتاوری بر روی براکت چپ اعمال نمیشود. این بدین معنی است که وایر بدون هیچ گونه زاویهای داخل براکت چپ میشود. در این حالت تنها یک گشتاور برابر 1860 گرم بر میلیمتر در جهت عقربههای ساعت در سیستم وجود دارد. وقتی که سیستم به حالت تعادل میرسد دندان سمت راست در جهت عقربههای ساعت میچرخد و با نیرویی برابر 7/265 گرم اکسترود میشود. در حالیکه دندان سمت چپ بدون هیچگونه چرخشی با همان مقدار نیرو اینترود میشود.
گروه هندسی پنج
در گروه پنج نسبت بین زوایای براکت برابر 75/0 – و نسبت بین گشتاورها برابر 4/0- است. در این گروه گشتاوری در جهت عقربههای ساعت به مقدار 1860 گرم بر میلیمتر روی براکت راست و گشتاوری بر خلاف جهت عقربههای ساعت به مقدار 740 گرم بر میلیمتر روی براکت چپ وجود دارد. برای به تعادل رساندن سیستم به گشتاوری بر خلاف جهت عقربههای ساعت به مقدار 1120 گرم بر میلیمتر نیاز میباشد. بنابراین نیروی 160 گرمی به سمت بالا روی براکت سمت راست و به سمت پایین روی براکت سمت چپ اعمال میشود. پس از به تعادل رسیدن سیستم، دندان سمت راست در جهت عقربههای ساعت میچرخد و اکسترود میشود در حالیکه دندان سمت چپ بر خلاف جهت عقربههای ساعت میچرخد و اینترود میشود.
گروه هندسی شش
در گروه شش نسبت بین زوایای براکت برابر 1- و نسبت بین گشتاورها برابر 1- است. توجه نمایید که زوایای بین هر دو براکت یکسان است. در حالیکه جهت آنها مخالف یکدیگر میباشد. از آنجائیکه زوایای براکتها یکی است زاویه ورود وایر به براکتها نیز یکی است و در این گروه گشتاورهای برابر اما در خلاف جهت یکدیگر تولید میشود و در واقع سیستم در حالت تعادل میباشد بنابراین هیچگونه نیروی تعدیل کننده در سیستم وجود ندارد.
خلاصه
در حقیقت هر دندان را میتوان به عنوان واحدی مستقل دارای مرکز مقاومت مربوط به خود در نظر گرفت. هنگامیکه یک دندان حرکت میکند دندانهای دیگر نیز به همان مقدار حرکت میکنند. تمامی دندانهای یک قوس که به یک وایر متصل شدهاند در حقیقت بر همدیگر تکیه دارند که به آن انکوریج متقابل (Reciprocal) گفته میشود. وقتی وایر به حالت تعادل میرسد صفحه اکلوزال (Occlusal Plane) نسبت به کرانیال بیس شیب خاصی به دست میاورد. این شیب به موقعیت دندانها، شکل قوس دندانی و شیب محوری براکتها وابسته است. این شیب ممکن است منجر به Deepbite یا Open Bite نامطلوب گردد.
مکانیک قوسهای V bend
در خلال درمان ارتودنسی به منظور حرکت مطلوب دندانی خم های مختلفی بر روی وایر ایجاد میشود. یک گروه از این خمها به شکل حرف v میباشند که به آنها v bends گفته میشود. این خمها عبارتند از Tipback، Gabel و Sweep خم نوع دوم. این خمها به صورت متداول در ارتودنسی ثابت استفاده میشوند. شناخت نیروهای آنها و استفاده آگاهانه از آنها میتواند باعث افزایش کیفیت درمان گردد.
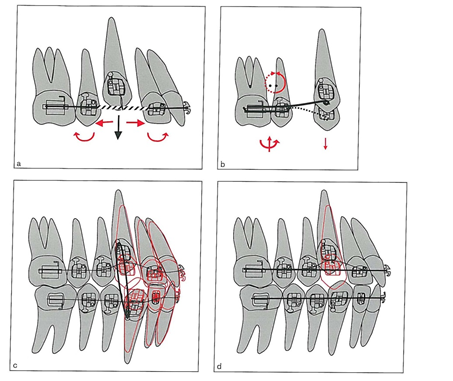
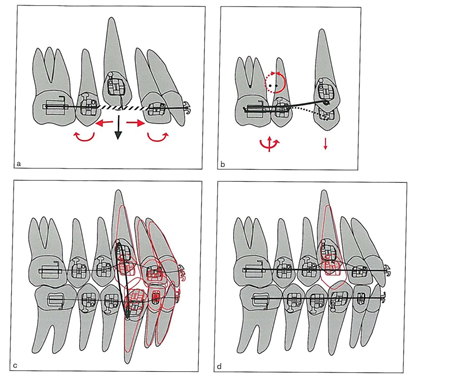
وقتی خم v در وایر بین دو دندان با انکوریج برابر (مثل کانین و پره مولر) ساخته میشودو بر روی براکت پره مولر قرار میگیرد. انتهای مزیال وایر در قسمت ژنژیوال براکت کانین واقع میشود (شکل a6-3). در این حالت وایر غیر فعال است بنابراین انتظار هیچ گونه حرکت دندانی وجود ندارد. هنگامیکه بخش مزیال وایر در داخل براکت کانین قرار میگیرد یک سیستم نیرو بین 2 دندان و وایر ایجاد میشود (شکل b6-3). از آنجائیکه انکوریجها با همدیگر برابر هستند مرکز مقاومت سیستم بین مرکز مقاومت دو دندان قرار میگیرد.
خم v گشتاوری در جهت عقربههای ساعت به براکت پره مولر و گشتاوری بر خلاف جهت عقربههای ساعت به براکت کانین وارد میکند. مجموع نیروهایی که به سیستم وارد میشود و تمامی گشتاورهای اطراف منطقه میبایست به صفر برسد. گشتاورهای برابر ولی در خلاف جهت یک دیگر باعث چرخش دندان ها حول مرکز مقاومت آنها میشود. به طوریکه تاج آنها از همدیگر دور میشود (شکل c6-3). با رسیدن نیروی وارد شده بر براکت به صفر، وایر کاملا غیر فعال میشود و سیستم به حالت تعادل میرسد. اگر تاج دندانها به همدیگر وصل شوند ریشه آنها حول مرکز چرخش به سمت یکدیگر حرکت میکنند. وقتی که وایر غیر فعال میشود شیب محوری دندانها تصحیح میشود (شکل d 6-3). در تکنیک Edgewise به این روش خم Gabel گفته میشود.
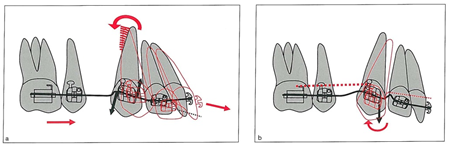
اگر خم v از میان دو دندان به دندان پره مولر نزدیک تر شود به طوریکه در فاصله یک سومی از آن قرار گیرد (شکل a 7-3) در حالیکه گشتاوری در جهت عقربههای ساعت به پره مولر وارد میشود هیچگونه گشتاوری بر روی کانین وارد نمی شود، زیرا وایر در داخل براکت غیر فعال است. بخش مزیال وایر تنها یک نیروی به سمت بالا بر روی دندان کانین وارد میکند. اکستروژن دندان پره مولر و اینتروژن دندان کانین سیستم را به حالت تعادل میرساند. اگر خم v همچنان به دندان پره مولر نزدیک تر شود زاویه وایر با براکت در آن محل بیشتر از دندان کانین میشود، (شکل b 7-3). بنابراین گشتاور بیشتری بر روی پره مولر اعمال میشود. توجه نمایند که جهت گشتاورها یکی است اما حرکت وایر به سمت دندان پره مولر باعث میشود وایر دندان کانین به سمت بالای خط فرضی بین 2 براکت حرکت کند. برای رسیدن به حالت تعادل هر دو دندان میبایست در جهت عقربههای ساعت بچرخند. دندان کانین اینترود و دندان پره مولر اکسترود میشوند. توجه نمایند که مقدار نیروی تعدیل کننده از مثال قبلی بیشتر میباشد و علت آن وجود دو گشتاور هم جهت در یک سیستم میباشد.
مثال بعدی شامل دو دندان مولر و کانین با مقدار انکوریج های متفاوت میباشد. خم v در شکل a 8-3 در وسط میباشد بنابراین وایر گشتاوری برابر و در خلاف جهت یکدیگر به هر دو دندان اعمال میکند. هر چند در شکل b8-3 خم v در یک سومی نزدیک به دندان مولر میباشد، این باعث گشتاوری در جهت عقربههای ساعت و نیروی اکسترود شونده در دندان مولر و نیروی اینترود کننده بر دندان کانین میشود. از آنجائیکه مرکز مقاومت این سیستم نزدیک به دندان مولر میباشد نیروی اکسترود کننده این دندان بیشتر از نیروی اینترود کننده دندان کانین میباشد. در شکل c8-3 خم v نزدیک تر به دندان مولر میباشد که باعث گشتاور بیشتری بر روی این دندان میشود و جهت گشتاور تغییر نمیکند. زیرا وایر از روی خط فرضی بین 2 براکت میگذرد بنابراین نیروهای تعدیل کننده (اکستروژن مولر و اینتروژن کانین) از مثال قبلی بیشتر میباشد. از نظر کلینیکی اکستروژن به آسانی انجام میشود و باعث Open Bite میگردد. به عنوان یک نمونه خوب از این سیستم میتوان به وایر Utility (4 × 2) با وجود Labial Root Torque روی انسیزورها و Tip Back روی مولرها اشاره کرد (شکل 9-3). در این شرایط گشتاورهایی بر خلاف جهت عقربههای ساعت در هر دو سمت روی میدهد. از آنجائیکه مرکز مقاومت سیستم به دندان مولر نزدیک تر میباشد نیروی تعدیل کننده هم بیشتر است (در برخی موارد میتوان به صورت عملی نشان داد که مرکز مقاومت در وایر 4 × 2 در قسمت میانی دندانهای خلفی و یا قدامی قرار دارد).
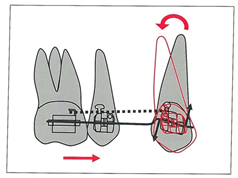
چنانچه خم v به براکت دندان کانین نزدیک تر شود (شکل 10-3) گشتاور روی دندان کانین بیشتر از مولر میشود. این باعث اکستروژن کانین و اینتروژن مولر میشود از نظر کلینیکی اینتروژن مولر به خاطر انکوریج زیاد آن مشکل است پس تنها اثر آن اکستروژن کانین است.
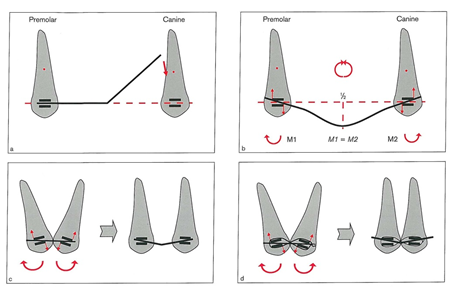
شکل 6-3. (a,b) وقتی خم v در وسط براکتهای 2 دندان با انکوریج برابر واقع میشود وایر پس از فعال شدن با زاویه یکسان وارد براکتها میشود. پس گشتاور در هر دو سمت برابر و خلاف جهت همدیگر میباشد. (c) قرار دادن خم v در وسط 2 دندانی که تاج آنها به سوی یکدیگر خم شده است باعث حرکت ریشهها به سوی یکدیگر حرکت میکنند اما تاجها از جای خود تکان نمیخورند. به این روش خم Gabel گفته میشود و از آن در تکنیک Edgewise استفاده میشود.
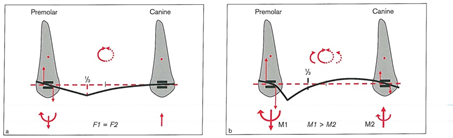
شکل 7-3.(a) نزدیک تر شدن خم v به طوریکه در یک سومی دندان پره مولر قرار گیرد باعث تغییر نیرو در سیستم میشود. زیرا زاویه بین وایر و براکت تغییر میکند. در این حالت وایر باعث گشتاوری در جهت عقربههای ساعت در دندان پره مولر میشود، اما به صورت غیر فعال در براکت کانین قرار میگیرد. (b) نزدیک تر شدن خم v به سوی دندان پره مولر باعث تغییر جدید در سیستم میشود. زاویه بین وایر و براکت در دندان پره مولر بیشتر از زاویه آن در دندان کانین میباشد. در این حالت وایر از بالای خط فرضی بین دو براکت میگذرد. بنابراین گشتاور بر روی پره مولر هم جهت با گشتاور کانین میشود.
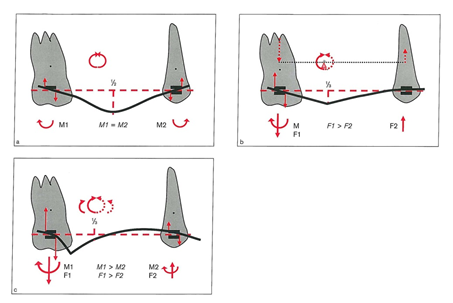
شکل 8-3. (a تا c) چنانچه خم های v مشابه شکلهای 6-3 و 7-3 بر روی 2 دندان یا انکوریج متفاوت قرار گیرد سیستم نیرو نیز متفاوت است. فرق اصلی در اینجا بزرگی نیروهای تعدیل کننده عمودی میباشد. از آنجائیکه مرکز مقاومت در سیستم به مولر نزدیک تر میباشد مقدار نیروی تعدیل کننده بر روی این دندان از کانین بیشتر است.
شکل 9-3. وقتی وایر Utility (خم v) با زوایای برابر Tip Back و Labial Root Torqueبر روی براکتها قرار گیرد اثر اکستروژن بر روی مولر بیشتر از اینتروژن روی انسیزور است، علت اصلی آن نزدیک تر بودن مرکز مقاومت به مولرها میباشد (X و Y به ترتیب نمایانگر زوایای Torque و Tip Back میباشد).
شکل 10-3. اگر خم v نزدیک تر به کانین قرار گیرد نیروی اینتروژن روی مولر و اکستروژن کانین برابر میشود اگرچه از نظر کلینیکی اکستروژن کانین ساده تر از اینتروژن مولر است.
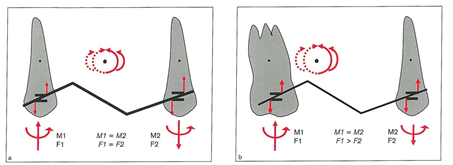
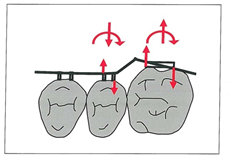
شکل 11-3. (a) هنگامیکه یک وایر دارای Step داخل براکت دو دندان یا انکوریج برابر قرار میگیرد گشتاورهای برابر و هم جهت در هر سمت ایجاد میشود. (b) اگر انکوریج دندانها متفاوت باشد نیروهای وارد بر دندان متفاوت خواهد بود زیرا مرکز مقاومت کل سیستم نیروها نزدیک تر به دندانی با انکوریج بیشتر خواهد بود.
مکانیک وایرهای دارای Step
خمهاي Artistic، Step Up، Step Down و خم انکوریج در مکانیک Tweed از نمونههای خم دارای Step میباشد. در این مکانیکها، گشتاورها در هر دو سمت برابر و هم جهت میباشد (m1/m2 برابر یک میباشد)؛ (شکل 11-3). در وایرهای دارای Step تغییر دادن محل خم Step بین براکتها تاثیری روی سیستم نیرو ندارد بنابراین محل خم تاثیری روی نسبت گشتاورها ندارد. همچنین تغییر ارتفاع Step باعث ایجاد یک رابطه خطی بین گشتاورها خواهد شد به عبارت دیگر ارتفاع Step تاثیری روی نسبت گشتاورها ندارد.
در وایرهای دارای Step فاصله بین براکت متناسب با گشتاور/نیرو است. به عبارت دیگر با زیاد شدن این فاصله نسبت گشتاور/نیرو زیاد میشود. مکانیک وایر دارای Step بین دو دندان با انکوریج برابر همانند مکانیک توضیح داده شده در گروه یک هندسی میباشد (به شکل 4-3 و 5-3 رجوع شود). به طور عملی افزایش دادن فاصله بین براکتها تنها هنگامی امکان پذیر است که از براکتهای با عرض کمتر استفاده شود. وقتی که فاصله بین براکتی ثابت باشد با افزایش ارتفاع Step گشتاور در هر دو سمت زیاد میشود. گشتاورهای بالا بدین معنی میباشد که نیروهای تعدیل کننده نیز بسیار زیاد میباشد.
خم های Artistic
خمهای Artistic عبارتند از خمهای v و خمهای Step که با کمک تکنیک Edgewise به منظور اصلاح شیب انسیزورها بر روی آنها قرار میگیرند. همچنانکه در انکوریج متقابل تاجها به سمت یکدیگر آورده میشوند ریشهها از هم دور میشوند.
شکل 12-3. خمهای Artistic یک نمونه از وایرهای دارایی Step میباشند.
شکل 13-3. وایرهای (a) مستقیم،(b) دارای Stepو (c) دارای Loop نتایج یکسانی به وجود میآورند. در هر سه مورد گشتاورها برابر و هم جهت هستند.
شکل 14-3. خمهای تقویتی انکوریج Tweed یک نمونه بارز از وایرهای دارای Step میباشند.
شکل 15-3. یک نمونه دیگر وایرهای دارای Step وجود Offset و Toe In در خم First Order میباشد.

شکل 16-3.(a) خم v در مرکز فاصله 2 براکت با زاویه x قرار داده شده است. (b) یک وایر مستقیم بین براکتها با زاویه یکسان x واقع شده است. از نظر بیومکانیک هیچ تفاوتی بین استفاده از این دو مورد وجود ندارد. نتایج حاصل شده و کاملا یکسان است و تنها تفاوت شکل خم میباشد در حقیقت a و b نمایانگر سیستمهای Standard Edgewiseو Straight Wire میباشد.
خم های Step Down و Step Up
از این خمها برای تصحیح ارتفاع بین 2 گروه دندانی و یا اصلاح موقعیت براکتها استفاده میشود. شکل a 13-3 نیروی حاصل از Straight Wire را نشان میدهد. هنگامیکه یک وایر مستقیم در براکت قرار میگیرد در هر دو سمت آن گشتاور مستقیم و هم جهت است که باعث تولید نیروی یکسان ولی در خلاف جهت یکدیگر میشود با استفاده از وایرهای دارای Step (شکل b 13-3) و دارای Loop (شکل c 13-3) نتایج یکسانی حاصل میشود.
خمهای انکوریج Tweed
از این خمها برای حرکت تاج دندان مولر به سمت عقب و هم چنین افزایش انکوریج هنگام کار برد الاستیک کلاس II استفاده میشود. قرار دادن خم دارای Step در ناحیه مزیالی و دیستالی مولر اول فک پایین گشتاوری برابر و هم جهت بر روی دندانهای درگیر ایجاد مینماید. (شکل 14-3). این سیستم نیرو هنگامی به تعادل میرسد که مولر دوم فک پایین اکسترود و پره مولرها اینترود شوند که ممکن است باعث باز شدن بایت نیز گردد. این مسئله در بیمارانی که دارای رشد عمودی صورت میباشند بسیار حائز اهمیت است.
یک نمونه دیگر از خمهای دارای Step وجود Offset و Toe In در جهت عرضی میباشد. شکل 15-3 یک سیستم نیرو شامل Offset و Toe In بر روی مولر را نشان میدهد. در این سیستم گشتاورها بر روی مولر و پره مولر دوم هم جهت میباشند نیروهای تعدیل کننده مولر را به سمت باکال و پره مولر دوم را به سمت پالاتال حرکت میدهد.
مکانیکهای Straight Wire
در مکانیسم اولی که توضیح داده شد یک وایر پیش ساخته بدون خم در داخل براکتهای زاویه دار (Preangulated) قرار داده شد. در مکانیسم دوم پس از ایجاد خمهای v و دارای Step بر روی وایر سیم در داخل براکت قرار داده شد. در هر دو مکانیسم گشتاور روی براکتها متناسب با زاویه بین براکت و وایر میباشد. در هر دو مکانیسم در زوایای یکسان گشتاور برابر میباشد. به عبارت دیگر نتایجی که از قرار دادن براکت دارای زاویه با وایر مستقیم و یا براکت بدون زاویه با وایر زاویه دار حاصل میشود یکسان است (شکل 16-3).
تفاوت اصلی بین تکنیک Straight Wire و سیستم Edgewise از همین مورد نشأت میگیرد. در سیستم Edgewise پیش از قرار دادن وایر در براکتهای بدون زاویه، خمهایی مثل Tip Back، Anti Rotation، Toe In،Anti Tip، Torque و یا Gable برای رسیدن به گشتاور مناسب میبایست در آن ایجاد شوند. اما در سیستم Straight بلافاصله پس از قرار دادن وایر در براکتهای زاویه دار گشتاور ایجاد میشود. از نظر کلینیکی مکانیسم این دو سیستم متفاوت است. ولی نتیجه حاصله یکسان است.
به عنوان مثال اگر هدف درمان عقب بردن کانین با تحت وایر Segmented در سیستم Edgewise باشد (شکل a17-3). یک خم Anti Tip (مثلا 13 درجه) میبایست در وایر ایجاد شود تا دندان به نحو مقتضی به عقب برده شود. چنانچه فرض نمائیم خم Anti Tipگشتاوری بر خلاف جهت عقربههای ساعت با بزرگی 1050 گرم بر میلیمتر ایجاد نماید یک نیروی عقب برنده 150 گرمی میبایست با فعال کردن Reverse Closing Loop ایجاد شود. برای افزایش نسبت میتوان زاویه خم Anti Tipرا زیاد کرد و یا مقدار نیرو را کاهش داد.
از سوی دیگر اگر وایر Straight را در داخل براکتی که 13 درجه زاویه دارد قرار دهیم همان گشتاور 1050 گرم بر میلیمتر حاصل میشود (شکل b 17-3). به منظور عقب بردن این دندان توسط Tipping کنترل شده دیگر نیازی به ایجاد خم بر روی وایر نمیباشد. زیرا زاویه Anti Tip از پیش بر روی براکت طراحی شده است. این گشتاور تاج را به سمت مزیال و ریشه را به سمت دیستال حرکت میدهد به منظور رسیدن به نسبت برابر نیروی عقب برنده 150 گرمی کافی است. در این مثال اصطکاک بین وایر و براکت در نظر گرفته نشده است.
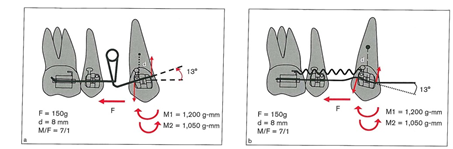
شکل 17-3.(a) در سیستم Edgewise برای حرکت کانین میبایست یک خم Anti Bend به مقدار 13 درجه در وایر ایجاد شود. (b) در سیستم Straight Wire زاویه مورد نیاز از قبل در براکت طراحی شده است. پس به محض قرار دادن وایر در براکت گشتاور مورد نیاز (M2) اعمال میشود.
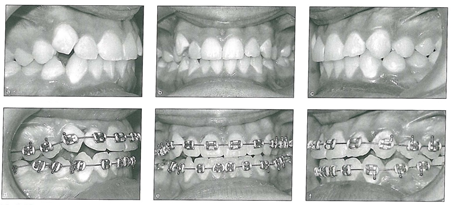
شکل 18-3. در این شکل Open Bite به علت در گیرد شدن Straight Wire در براکت کانینی که در موقعیت بالاتر قرار دارد، مشاهده میشود. Interdigitation مطلوب (a تا c) تنها پس از یک ماه از بین رفته است (شکل d تا f). دقت نمائید که Open Bite تنها به علت پروتروژن دندانهای قدامی بالا و اینتروژن دندانهای پر مولر ایجاد شده است. اگر پره مولرهای اول در آورده شده بودند انتظار میرفت که دندانهای مجاور به فضای دندان درآورده شده حرکت نمایند.
سیستم Straight Wire به مواردی مثل شیب براکت، موقعیت دندانها و شکل کلی قوس دندانی وابسته است. معمولا پیش بینی شیب نهایی پلان اکلوزال در هنگامی که از Straight Wire استفاده میشود دشوار است. به عبارت دیگر مکانیسم اثر نهایی در Straight Wire نامشخص است. شکل 18-3 یک نمونه از تاثیر نامطلوب Straight Wireبر روی کانینی که بالاتر قرار گرفته است را نشان میدهد. موقعیت کانین باعث گردید Flaring و اینتروژن انسیزورها در بیمار Open Bite ایجاد کند. قرار دادن وایرهای الاستیک بر روی کانینی که در موقعیت بالاتر از قوس قرار دارد (شکل 19-3) و یا دندانهای اکتوپیک باعث دفورم شدن قوس فکی میگردد و در نهایت ممکن است پلان اکلوزال را شیب دار کند. شکل 20-3 سه مثال برای جلوگیری از این تاثیرات نامطلوب را نشان میدهد.
شکل 19-3. قرار دادن وایر الاستیک بر روی کانینی که در موقعیت بالاتری از پلان اکلوزال قرار دارد باعث دفورم شدن قوس فکی و یا شیب دار شدن پلان اکلوزال میگردد.
شکل 20-3. 4 روش جهت اکسترود کردن دندان کانین: (a) قرار دادن یک Coil Spring بین دندانهای لترال و پره مولر بر روی سیم 016/0 استینلس استیل جهت حفظ فضا و جلوگیری از Tipping دندانهای مجاور. (b) قرار دادن وایر Cantilever با خم v جهت پایین آوردن کانین. Cantilever میبایست تنها از یک نقطه به کانین متصل شده باشد تا گشتاور نامطلوب ایجاد نشود. (c) انکوریج متقابل با استفاده از الاستیک بین فکی بر روی کانین ها. (d) استفاده از وایر کمکی014/0 یا 016/0 نیکل تیتانیوم و قرار دادن آن بر روی وایر اصلی استینلس استیل مربع مستطیل.
Lace Back
اختلاف اصلی بین دو مکانیسم Edgewise و Straight این است که در سیستم Edgewise نسبت توسط خمهای داخل وایر کنترل میشود در حالیکه در سیستم Straight زاویه از پیش طراحی شده بر روی براکت این نسبت را کنترل میکند.
بنابراین به منظور کاهش اثرات نامطلوب زوایای بین وایر و براکت در سیستم Straight ، خصوصاً در ابتدای درمان کانینها و مولرها میبایست محکم توسط Lace Back Ligature به هم متصل شوند (شکل 22-3 و 21-3). در این حالت با حرکت دستیابی رشد حول مرکز چرخش میتوان از پروتروژن تاج جلوگیری کرد. این حرکت آنقدر ادامه مییابد تا زمانی که سیم غیر فعال گردد. چنانچه نیاز به حرکت بیشتر کانین به سمت دیستال باشد میتوان به مقدار کمی Lace Back را فعال کرد این کار باعث حرکت کنترل شده تاج میگردد.
اگر Lace Backبیشتر فعال گردد و سرعت حرکت تاج کانین به سمت دیستال افزایش مییابد این سرعت را میتوان توسط سفتی وایر کنترل کرد. در این پروسه با افزایش زاویه بین براکت و وایر، اصطکاک بین وایر و براکت نیز افزایش مییابد. این اصطکاک جلوی حرکت دندان را میگیرد. به منظور رفع این مشکل میبایست تا زمان Upright شدن و غیر فعال شدن وایر تامل نمود. طول مدت به سفتی وایر و فاکتورهای بیولوژیک مثل طول ریشه، سن و چگالی استخوان آلوئول بستگی دارد. از نظر کلینیکی این مدت به علت از دست رفتن زمان و از بین رفتن انکوریج بسیار نامطلوب است. برای توضیحات بیشتر به فصل 4 مراجعه شود.
اگر کانین ها بالاتر از سطوح اکلوزال و یا در جهت دیستال باشند Straight Wire هنگام عبور از براکت زاویه دار دندان کانین در زیر براکتهای دندانهای قدامی قرار میگیرد چنانچه وایر را از داخل براکت دندانهای قدامی عبور دهیم سه اثر ذیل ممکن است حاصل شود.
اولین مورد اثر قایقی (Row Boat) میباشد که علت آن گشتاور بر خلاف جهت عقربههای ساعت برروی کانین میباشد و بر روی انکوریج اثر میگذارد. این گشتاور تاج دندانهای قدامی را به سمت جلو میبرد و باعث پروتروژن آنها میشود. تنها راه جلوگیری از این اثر استفاده از Lace Back میباشد.
در بیماران Cl II Div I که از آنها دندان در آورده میشود اثر قایقی Row Boat به علت حرکت رفت و برگشت دندان مطلوب نیست و میتواند منجر به تحلیل ریشه شود.
Lace Backمیتواند از حرکت قدامی تاج کانین جلوگیری کند. در بیماران دارای مال اکلوژن Cl II Div II که دندانی خارج نمیشود پروتروژن دندانهای قدامی میتواند مطلوب باشد. بنابراین استفاده از Straight Wire میتواند باعث ایجاد پروتروژن دندانهای قدامی و ردیف شدن سریع دندانها گردد.
اثر دوم عمیق تر شدن Bite میباشد (Bowing Effect) (شکل a 23-3). معمولا عمیق شدن بایت در خلال درمان مطلوب نیست. مگر اینکه بیمار دارای Open Bite قدامی باشد که میبایست با اکستروژن دندانهای قدامی فک بالا تصحیح شود. به منظور تشخیص این اثر وایر را به طور آزمایشی فقط از روی براکت کانین عبور دهید. اگر قسمت قدامی وایر از زیر براکتهای دندانهای انسیزور بگذرد به منظور جلوگیری کردن از اکستروژن دندانهای قدامی وایر نباید به براکت این دندانها درگیر شود. اگر وایر انعطاف پذیر باشد میتواند با ایجاد پله آن را از ناحیه ژنژیوال انسیزور عبور داد. روش دیگر این است که از وایر اینترود کننده دیگری همراه با Straight Wire استفاده شود. وایر اینترود کننده تاثیر اکستروژن Straight Wire را خنثی میکند.
اگر وایر پله دار از انسیزورها به منظور اینترود کردن آنها یا جلوگیری از اکسترود شدن آنها عبور کند سبب حرکت دیستالی تاج کانین میشود. این حرکت به علت گشتاور در جهت عقربههای ساعت روی براکت میباشد (شکل b 23-3).
در توضیحات فوق دلیل اصلی تاثیرات نامطلوب موقعیت یا شیب محوری دندانها یا براکتها میباشد. چنانچه علت اصلی شیب محوری کانینها باشد قبل از استفاده از وایر میبایست با کمک Lace Back کانینها را Upright کرد.
شکل 21-3.Lace Back از Tipping تاج دندان جلوگیری میکند و شیب کانین را تصحیح میکند.

شکل 22-3.(a). به منظور جلوگیری از اکستروژن چنانچه Straight Wire پس از عبور از براکت کانین در زیر براکت دندانهای قدامی قرار گیرد نباید وایر را در براکت دندانهای انسیزور قرار داد. (c,b) در این حالت به جای استفاده از وایرهای نیکل تیتانیوم میتوان از وایرهای استینلس استیل با خمهای پلکانی استفاده کرد و آنها را از براکت انسیزورها bypass کرد این روش برای درمان اپن بایت قدامی که نیاز به اکستروژن انسیزور دارند مطلوب است.
شکل 23-3.(a). Bowing Effect میتواند به علت موقعیت دندان کانین باعث عمیق تر شدن بایت شود. (b) در صورت استفاده از وایر انعطاف پذیر میتوان با ایجاد خم پلکانی وایر را از قسمت ژنژیوال دندانهای قدامی عبور داد. چنانچه وایر پلکانی از داخل براکتهای قدامی عبور کند باعث حرکت تاج کانین به سمت عقب میشود. علت این حرکت گشتاور در جهت عقربههای ساعت میباشد.
نتیجه گیری
در آنالیز روابط بین دو دندان در تمامی مثالهایی که در اینجا عنوان شده است قطر شیار براکت و عرض براکتها یکسان فرض شده است زیرا تغییر این اندازهها میتواند بر مقدار نیرو اثر بگذارد. از نظر کلینیکی چگالی استخوان آلوئول که دندانها در آن واقع شدهاند، سن بیمار، نیروهای اکلوزالی، عادات بیمار، فشارهای بافت نرم، عادات پارافانکشنال، تعداد و طول ریشهها و فاکتورهای دیگر میتواند بر روی حرکت دندانها اثر بگذارد. این بیومکانیکها از قوانین ساده فیزیک پیروی میکنند. بنابراین قبل از قراردادن وایر در شیار براکت بایستی تمامی موارد فوق را در نظر گرفت. مکانیسم Straight Wire ترکیبی از روابط بین دو دندان میباشد. هنگام استفاده از وایر پیش بینی مقدار گشتاور، نیروهای بالانس کننده و جهت آنها دشوار است. نام دیگر سیستم Straight Wire مکانیک مبتنی بر شکل دندان (Shape – Driven) میباشد. زیرا موقعیت دندان، شیب محوری آنها و شکل قوس فکی تاثیرات مستقیمی بر این سیستم دارد.
دانلود فصل سوم از کتاب اصول علمی و کاربردی بیومکانیک در ارتودنسی (انالیز مکانیک های بین دو دندان) انتشارات جعفری